
Radio Controlled
Last modified by Eric Nantel on 2024/10/15 08:10
CAUTION: Before powering the motors, ensure they rotate in the same direction on each side. If the wiring between the motors and the Sabertooth was done correctly, the motors on each side of the robot should rotate in the same direction. If the front and rear motors rotate in opposite directions however, the track which connects them will cause them to stall and burn very quickly! If you are at all uncertain, it is safest to remove the sprockets and test the motors. If they rotate in opposite directions, the wiring to the Sabertooth needs to be corrected.
| The following steps are described for the Dimension Engineering Sabertooth 2x12A DC motor controller. Note that the DIP switch setup for other Sabertooth motor controllers may not be the same and as such it is your responsibility to read the user guide and understand the electronic setup, connections and power requirements for the electronics you purchased. | ||
| 1. Set the Sabertooth DIP Switches | ||
| Sabertooth 2 x 12A Standard | Typical Setup | |
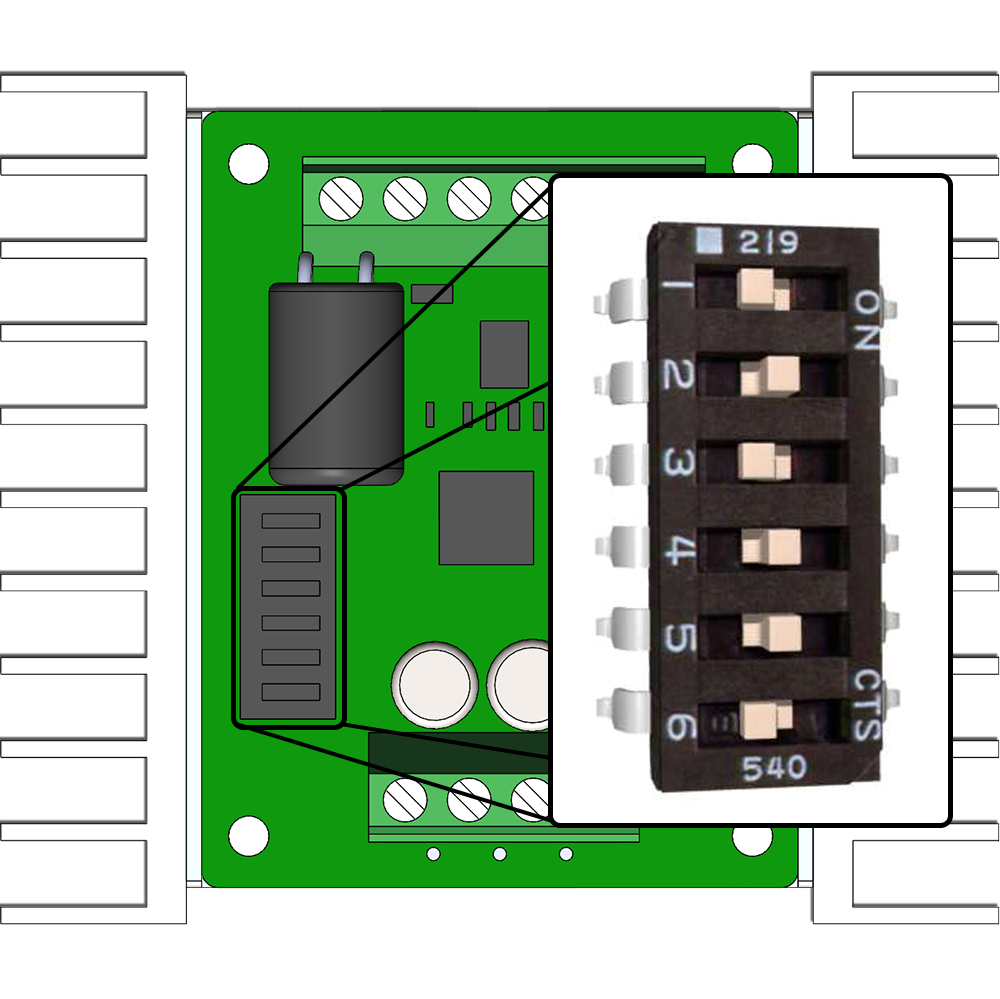 | 1 | OFF (RC Mode) |
| 2 | ON (RC Mode) | |
| 3 | OFF (Lithium Batterie) | |
| 4 | ON (Enable Mixing Mode) | |
| 5 | ON (Disable Exponential) | |
| 6 | ON (Standard R/C Autocalibration) | |
| 2. Lift the rover on something to avoid the wheels / tracks to touch the ground. Connecting the batterie will likely have it spin. | ||
| 3. Connect the main battery | ||
| 4. Calibration | ||
| The throttle stick may need to be zeroed, or the mixing modified so the rover moves in a straight line rather than a gentle arc. To understand the changes needed and how to proceed, please refer to the user manual of your remote control.
| |
