Microcontroller
Last modified by Eric Nantel on 2022/04/29 09:11
CAUTION: Before powering the motors, ensure they rotate in the same direction on each side. If the wiring between the motors and the Sabertooth was done correctly, the motors on each side of the robot should rotate in the same direction. If you are at all uncertain, it is safest to remove the sprockets and test the motors. If they rotate in opposite directions, the wiring to the Sabertooth needs to be corrected.
| The following steps are described for the Lynxmotion BotBoarduino microcontroller and Dimension Engineering Sabertooth 2x12A DC motor controller. Note that the DIP switch setup for other Sabertooth motor controllers may not be the same. Should you have selected a different microcontroller, FPGA or single board computer, or a different motor controller, it is your responsibility to read the user guide and understand the electronic setup, connections and power requirements. | ||
| 1. Set the Sabertooth DIP Switches | ||
| Sabertooth 2 x 12A Standard | Typical Setup | |
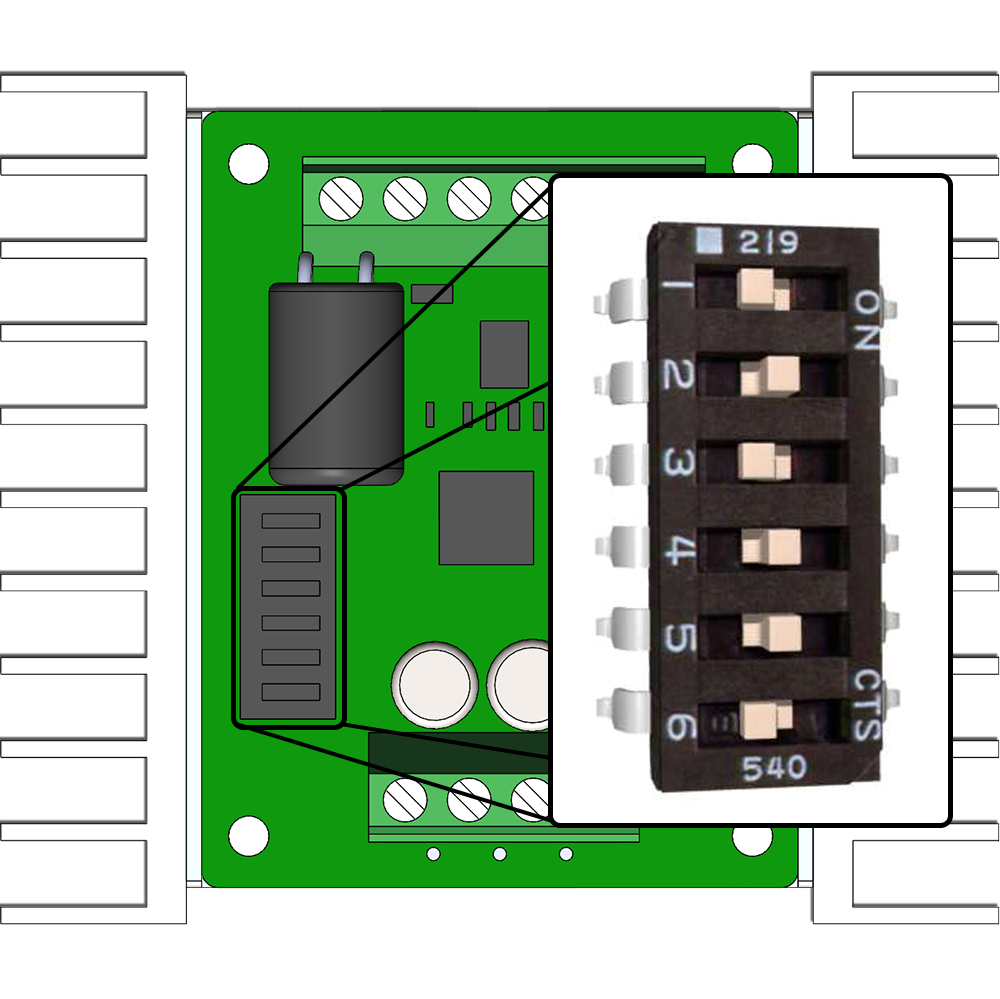 | 1 | OFF (Enable RC Mode) |
| 2 | ON (Enable RC Mode) | |
| 3 | OFF (Lithium Battery Mode) | |
| 4 | ON (Enable Mixing Mode) | |
| 5 | ON (Disable Exponential) | |
| 6 | OFF (Disable Timeout) | |
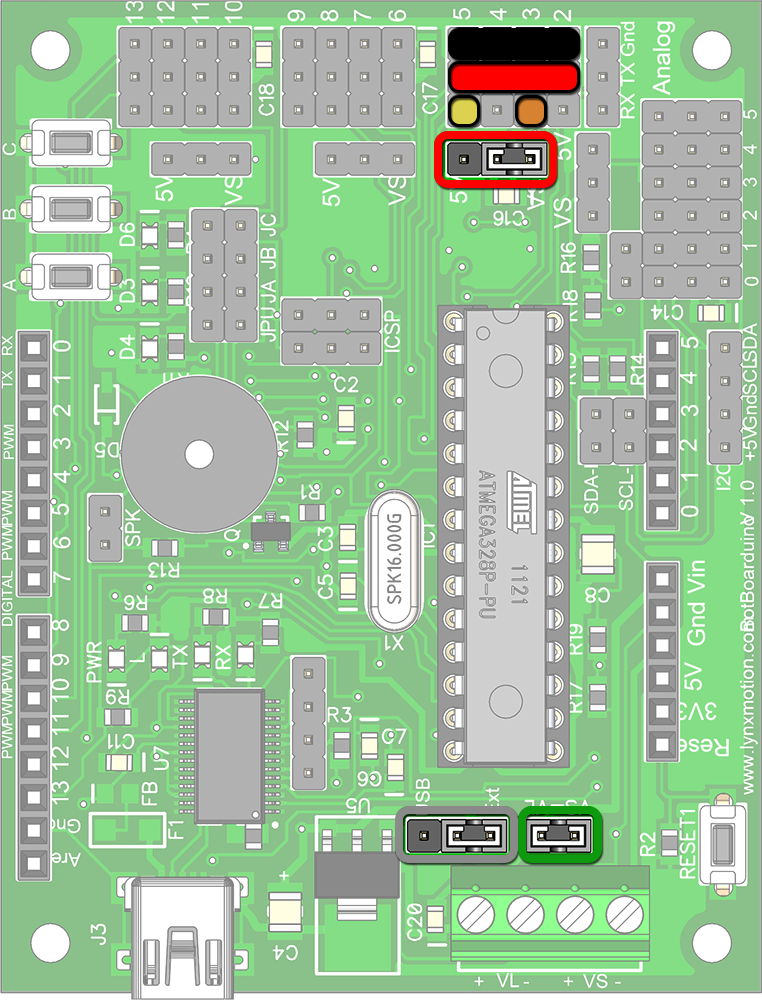
| 2. Connect the Sabertooth to your Microcontroller | ||
| Jumper on "VS" to use the Sabertooth as the power source for the BotBoarduino | |
 | Ground or 0V | |
 | To "S1" on Sabertooth #1 | |
 | To "S2" on Sabertooth #1 | |
 | Jumper on "Ext" to power the BotBoarduino from the Sabertooth 5V regulator | |
 | Jumper on "VL = VS" to link the two together | |
| More Info: BotBoarduino User Manual | ||
| 3. Lift the rover on something to avoid the wheels / tracks to touch the ground. Connecting the batterie will likely have it spin. | ||
| 4. Connect the main battery (required to power the BotBoarduino) | ||
5. Upload your code | ||