
MH2 Hexapod
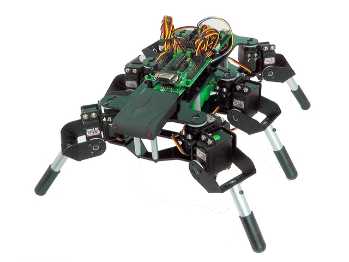

Table of Contents
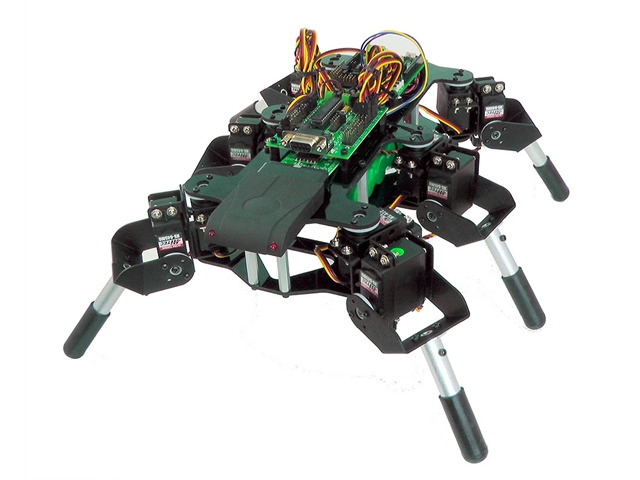
Description
About the MH2 Walking Robot The Mechanics Controlling the Robot The third kit includes a full version of FlowBotics Studio and includes the SSC-32 as well as a serial to Bluetooth board and Bluetooth module which allows for remote control from the computer. This approach offloads the higher level calculations to the computer. FlowBotics Studio includes a demo project for the MH2 with pre-written walking algorithms. Powering Options Important! |
|
|

Specifications
- Servo motion control = local closed loop
- Steering = Differential
- Number of legs = 6
- Degrees of freedom per leg = 2
- Motion speed = up to ~10"/S
- Height (body) = 3.00"
- Height (overall) = up to 6.00"
- Width (body) = 3.50"
- Width (overall) = 7.00" (legs straight)
- Length (body) = 13.00"
- Length (overall) = 14.50"
- Weight (w/out batteries) = 3lb 5oz.
- Ground clearance = up to 4.00"
User Guide
General
- Polycarbonate Information Page
- RC Servo Mid Position Tutorial
- RC Servo Mini-Guide
- RC Digital Servo End Stops (HFP-10)
MH2 Hexapod Information
- Simple 2DoF Leg Assembly Instructions
- Mini Inline Hexapod Body Assembly Instructions Rev. 1.2
- The Complete 2DoF Hexapod Tutorial
Additional Information