
Humanoid Biped Hand "B" Assembly Guide
Humanoid Biped Hand "B" Assembly Guide — Rev. 1
Updated December 21, 2011
Safety first! Wear eye protection and never touch a powered robot!
This guide covers one hand for the robot's right side. Repeat all steps as a mirror image for the left side.

Humanoid Biped Hand "B".
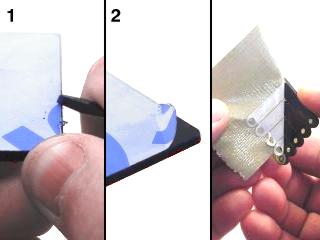
Remove the protective covering from all Lexan pieces before assembly. The laser cutting process melts the covering into the cut edge, making removal harder. Gently scrape the cut edge with a flat blade screwdriver to lift and peel the covering off.
On smaller pieces, use duct tape to lift the covering after scraping. For more information on Lexan, see this page.
 Lexan preparation.
Lexan preparation.
Attach two multi-purpose servo brackets together as shown using two 2-56 x .250" screws and 2-56 nuts.
 Figure 1.
Figure 1.
Connect the offset "C" bracket to a multi-purpose bracket as shown. Refer to Figure 2-1 for ball bearing detail.
Figure 2-1 — Ball bearing detail.
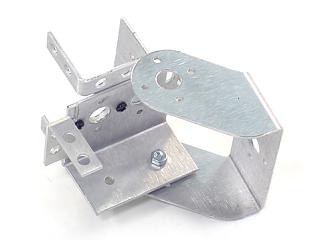 Figure 2-2.
Figure 2-2.
Attach two servos as shown using snap rivet fasteners and #2 tapping screws.
 Figure 3.
Figure 3.
Attach the 3/4" spacers to the slimmer hand panel as shown using three 4-40 x 1/4" screws.
 Figure 4.
Figure 4.
Use four snap rivet fasteners to attach the servo in place as shown.
 Figure 5.
Figure 5.
Attach the second hand panel as shown using three 4-40 x 1/4" screws.
 Figure 6.
Figure 6.
Firmly attach the servo hinge to the servo as shown. Make sure to align the hole with the servo horn.
 Figure 7.
Figure 7.
Use a "C" bracket to attach the hand to the biped as shown. Position the ball bearing so the flange is on the outside of the bracket. Then use two #2 tapping screws to attach the "C" bracket to the servo.
 Figure 8a (ball bearing).
Figure 8a (ball bearing).
 Figure 8b ("C" bracket attached).
Figure 8b ("C" bracket attached).
Attach the forearm to the upper arm using two #2 tapping screws. To mount the arm to the biped torso, use two more #2 tapping screws to attach the offset "C" bracket to the torso servo.
Figure 9 (completed arm).