
08 - 5 DoF ROS2 Support
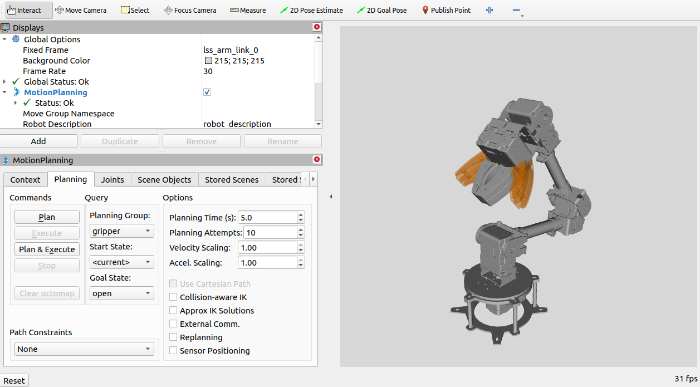
Table of Contents
DescriptionLSS-ROS2-Arms is an entirely open-source ROS package that allows to control a physical or simulated SES V2 Arm (4DoF or 5DoF version). GitHub: LSS-ROS2-Arms A physical robot is not needed to experiment with the simulation examples in Ignition Gazebo. However, as the LSS Arm does not carry an onboard computer a PC, Single Board Computer or Virtual Machine is required to run Ubuntu 20.04 (Focal Fossa) with ROS 2 Galactic. Please note that a PC will offer significantly higher processing performance than an SBC or VM, so a laptop or desktop is recommended for running simulations. Nevertheless, if you only wish to control a physical robot either computer option will suffice. | |
InstructionsFollow the README.md file for a complete guide on how to use the examples. | |
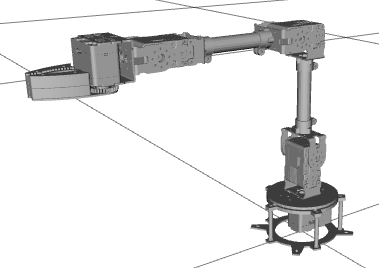
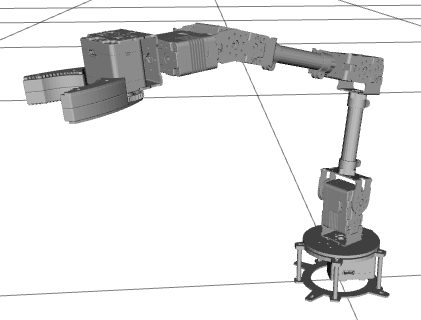
| LSS 4 DoF Arm | LSS 5 DoF Arm |
 |  |
 | |