A4WD3 Mecanum

Table of Contents
Description
The Lynxmotion A4WD3 Mecanum Rover is a general purpose mobile robotic platform intended to be used in RC control or microcontroller-based for autonomous or semi-autonomous use. Each wheel is controlled independently to allow the robot to move in any 2D direction (i.e. omnidirectional drive). The wheels are large enough to be able to travel over bumps and obstacles, but the system is most suitable for flat surfaces, and it is best to avoid debris falling between the rollers.
More about Mecanum here: https://en.wikipedia.org/wiki/Mecanum_wheel
The machined aluminum frame integrates rotary seals around each motor shaft, and solid rubber cord between the frame and all panel openings, making it dust and water resistant. A large marine inspection hatch on the top panel provides easy access to internal parts as well as being able to quickly swap or recharge batteries. Aside from the internal electronics mounting plate, the platform is symmetric and can be inverted.
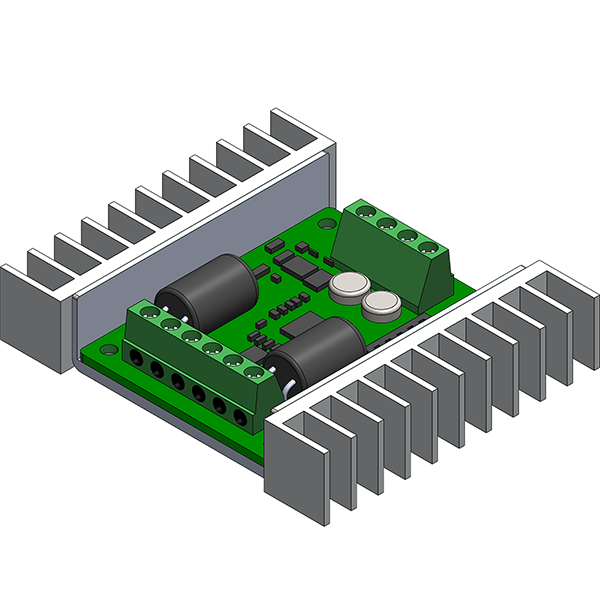
The rover includes four powerful 12V DC motors coupled to 51:1 all metal planetary gears. The rear shaft of each motor is equipped with a magnetic encoder which provides 12 pulses per revolution (PPR). These motors provide 4WD and allow the 4WD variation to reach a top speed of around 3m/s (120”/s) without payload. Unlike the 4WD and tracked variations of the A4WD3, the Mecanum rover requires two dual channel motor controllers.
Front and rear access panels are made of G10 composite and are intended to allow users to machine openings to add their own components, which may include a wired tether for power and control, LED or LCD feedback, a handle, or whatever else their application may need. Included are a pair of transparent polycarbonate panels which allow for an internally mounted camera and/or or LED lights for increased visibility. Additional panels are available separately.
Features
- 4x planetary geared DC motors (12V) with rear encoders
- 1x Set of four Mecanum wheels, hubs and adapters
- Machined aluminum frame with G10 composite plates
- Shaft seals & solid rubber cord for water and dust resistance
- Internal mounting plate for electronics & battery
Specifications
A4WD3 Mecanum
- Max speed: ~1.4m/s (55in/s)
- Weight: 5.55kg (12.23lbs)
- Rating: Water and dust resistant
- Chassis: Aluminum frame & G10 (fiberglass) Pannels
- Wheels: 152mm diameter mecanum wheels, rubber rollers
Motors
- Output Shaft: D-Shape 8mm
- Operating Voltage: 12VDC
- Gears: Metal planetary gear
- Unload Speed: 170RPM (±10%)
- Loaded Speed: 145RPM (±10%)
- Torque: 11.5kg.cm (9.98lb.in)
- Gear Ratio: 51:1
- Current: ≤3A
Encoder
- Operating Voltage: 5V
- Signal: Square wave AB 90 deg,
- Pulse: 12 PPR
- Frequency: 800kHz
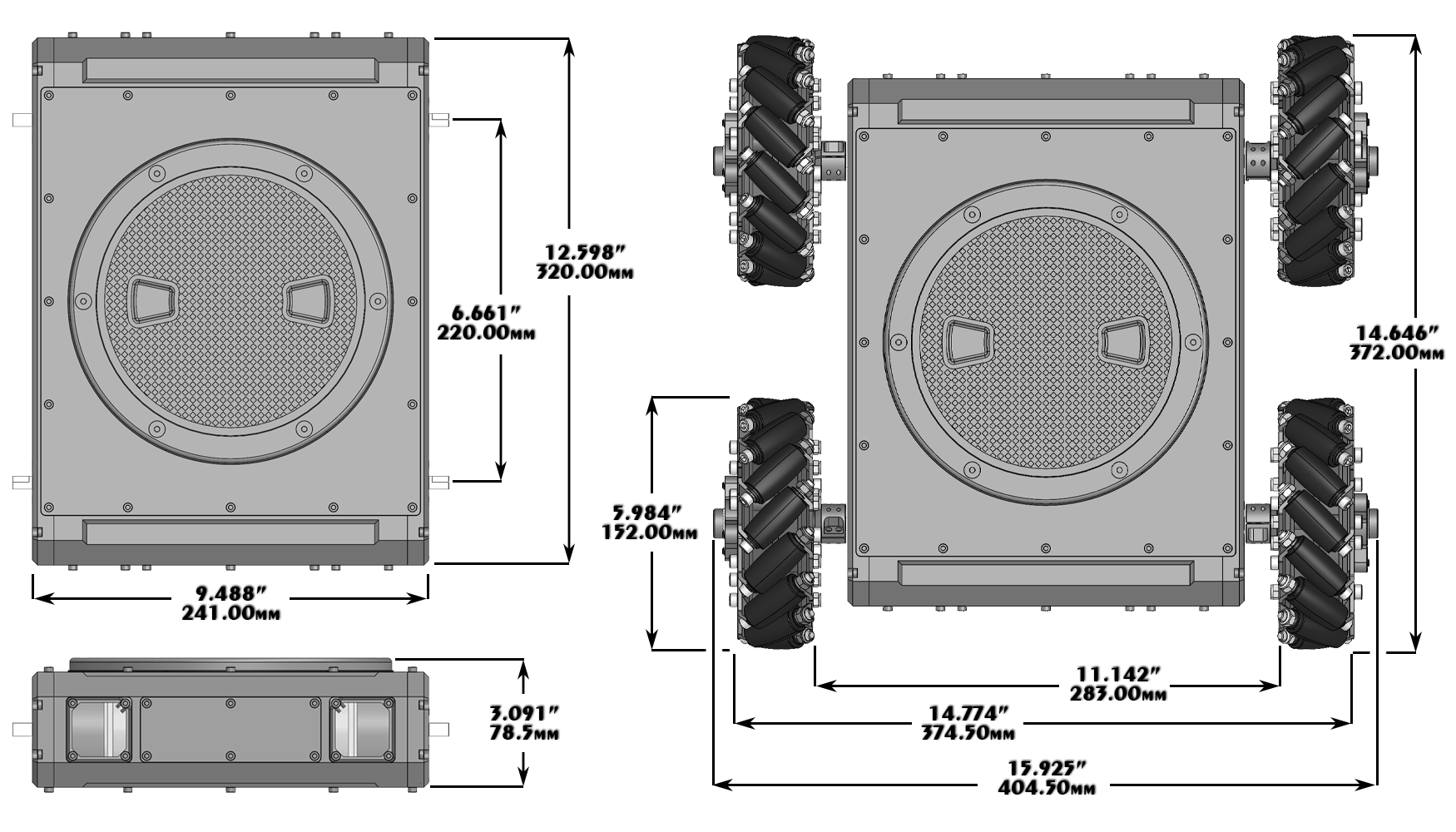
Dimensions
- Length: 372mm / 14.646"
- Width: 374.5mm / 14.774"
- Height: 152mm / 5.984"
- Ground clearance: 38.5mm / 1.516"
Media
User Guide
 | A4WD3 Mecanum Rover KIT steps: |
CAD Files
What's Included
Base Kit | ||||||
| Rover Robots | Screws | |||||
| 1x A4WD3-KT | 8x CPS-03 | 4x SHS-19 | 8x SHS-17 | 12x M5x55-SH | ||
| Frame Only | 10mm x M3 Setscrew | 12mm x M12 | 10mm x M3 | M5 x 55mm | ||
|
|
|
|
| ||
| Washers | Tubing & Hubs | Wheels | ||||
| 4x LW-01 | 4x A4WD3-WH | 4x A4WD3-WA | 2x A4WD3-W-ME-A | 2x A4WD3-W-ME-B | ||
| M12 Lock Washer | 8mm to 17mm Hex Hub | 17mm Wheel Adapter | Mecanum A | Mecanum B | ||
|
|
|
|
| ||
| Hex Keys | ||||||
| 1x HEX-1.5mm | 1x HEX-4mm | 1x HEX-10mm | ||||
| Hex Key 1.5mm | Hex Key 4mm | Hex Key 10mm | ||||
|
|
| ||||











Autonomous Kit | ||||||
| Wiring | Modules | Mot. Controllers | Batteries | |||
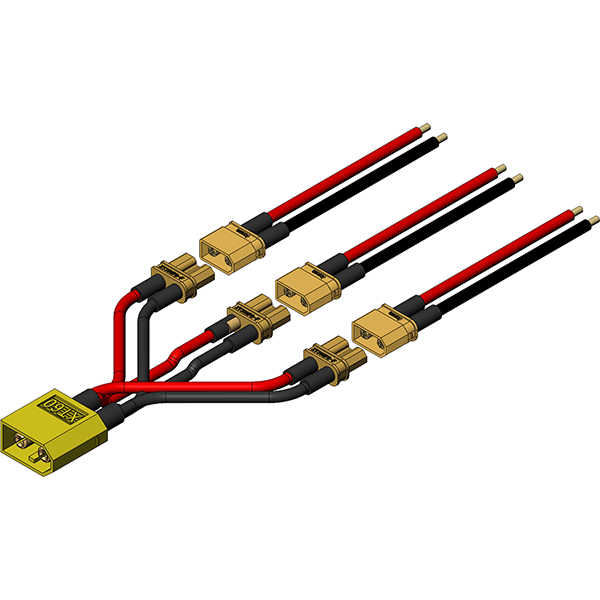
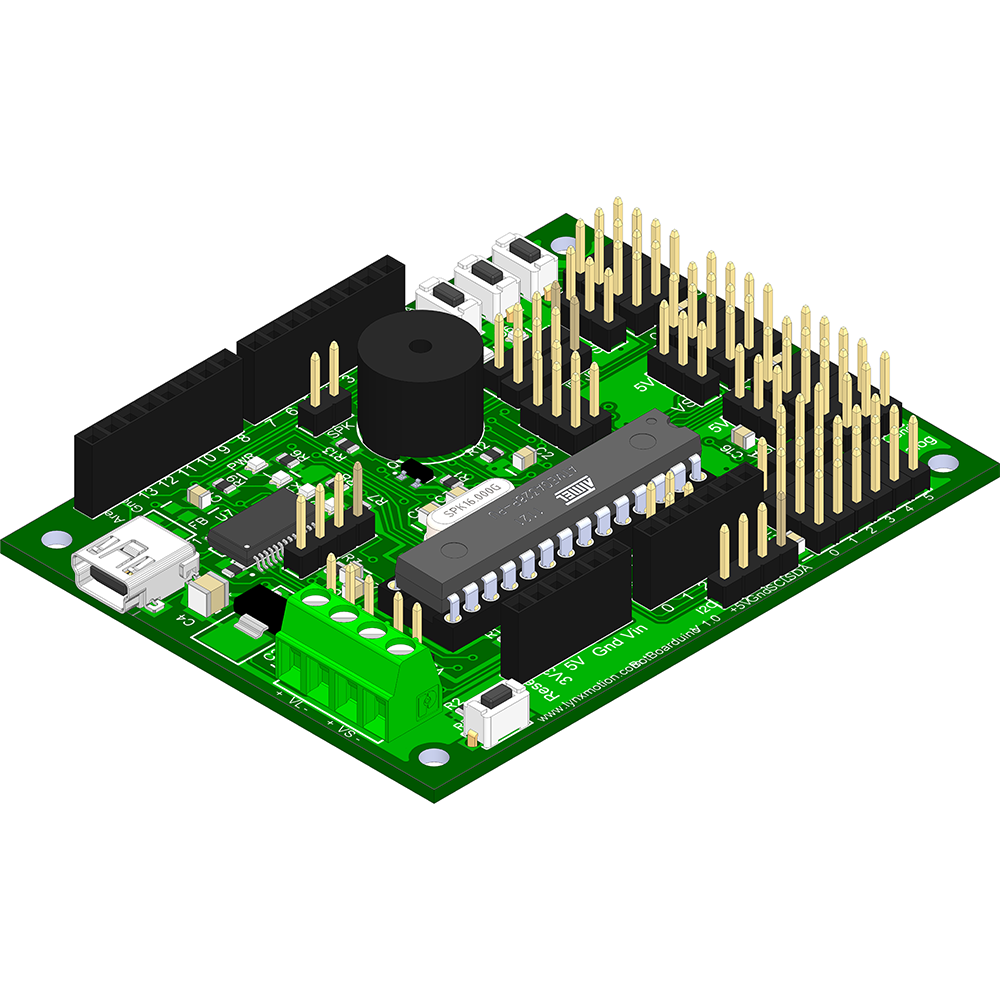
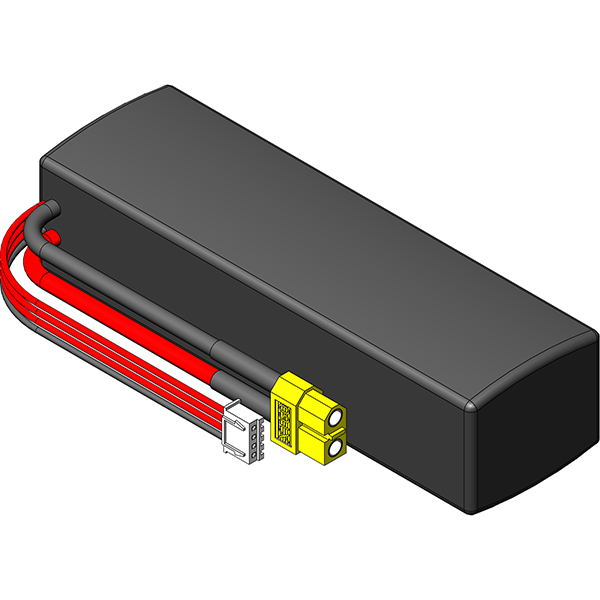
| 1x WH-XT60-XT30-01 | 3x SC-01 | 1x SEA-01 | 1x BBU-01 | 2x Sabertooth | 1x SL-LP-08 | |
| Power Harness | Servo Cable 12" | Servo Extension Cable 6" | BotBoarduino Microcontroller | 2x12A Standard | 4000mAh 3s LiPo Battery | |
|
|
|
|
|
| |
| Chargers | Wiring | |||||
| 1x B3AC | 1x USBC-02 | |||||
| LiPo Charger | USB Mini Cable | |||||
|
| |||||