
03 - Wiring
Last modified by Eric Nantel on 2022/10/03 14:42
| Microcontroller / Independent | |
| Two dual channel Sabertooth motor controllers are needed because each motor is connected to its own channel and can be controlled independently. Normally the encoders are connected to the microcontroller to measure angular speed and estimate distance traveled. Connections between microcontroller and the Sabertooth controller and encoders depend on the microcontroller chosen. | |
|
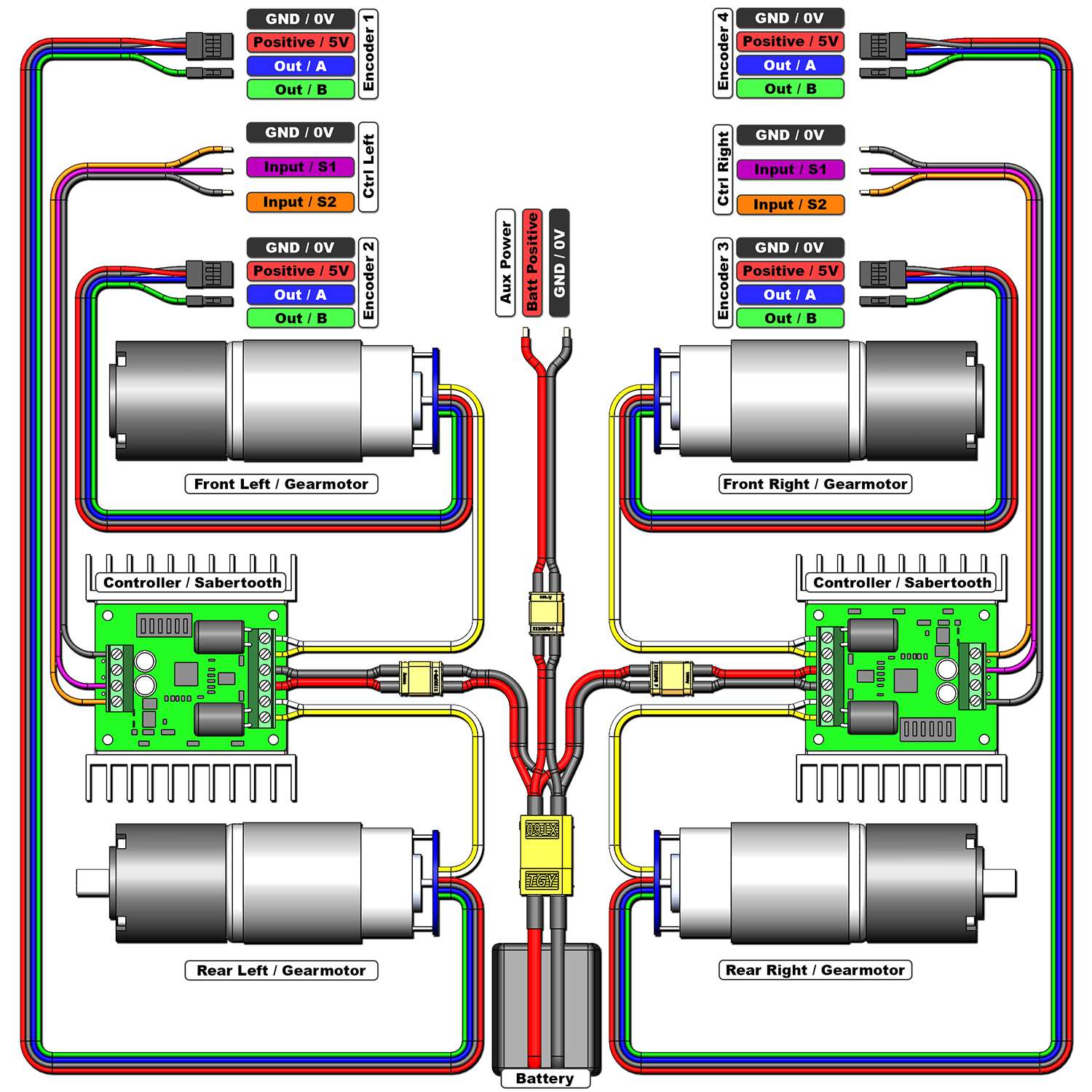
CAUTION: Before powering the motors, ensure they rotate in the same direction on each side. If the wiring between the motors and the Sabertooth was done correctly, the motors on each side of the robot should rotate in the same direction.
If the front and rear motors rotate in opposite directions however, the track which connects them will cause them to stall and burn very quickly! If you are at all uncertain, it is safest to remove the sprockets and test the motors. If they rotate in opposite directions, the wiring to the Sabertooth needs to be corrected.
If the front and rear motors rotate in opposite directions however, the track which connects them will cause them to stall and burn very quickly! If you are at all uncertain, it is safest to remove the sprockets and test the motors. If they rotate in opposite directions, the wiring to the Sabertooth needs to be corrected.
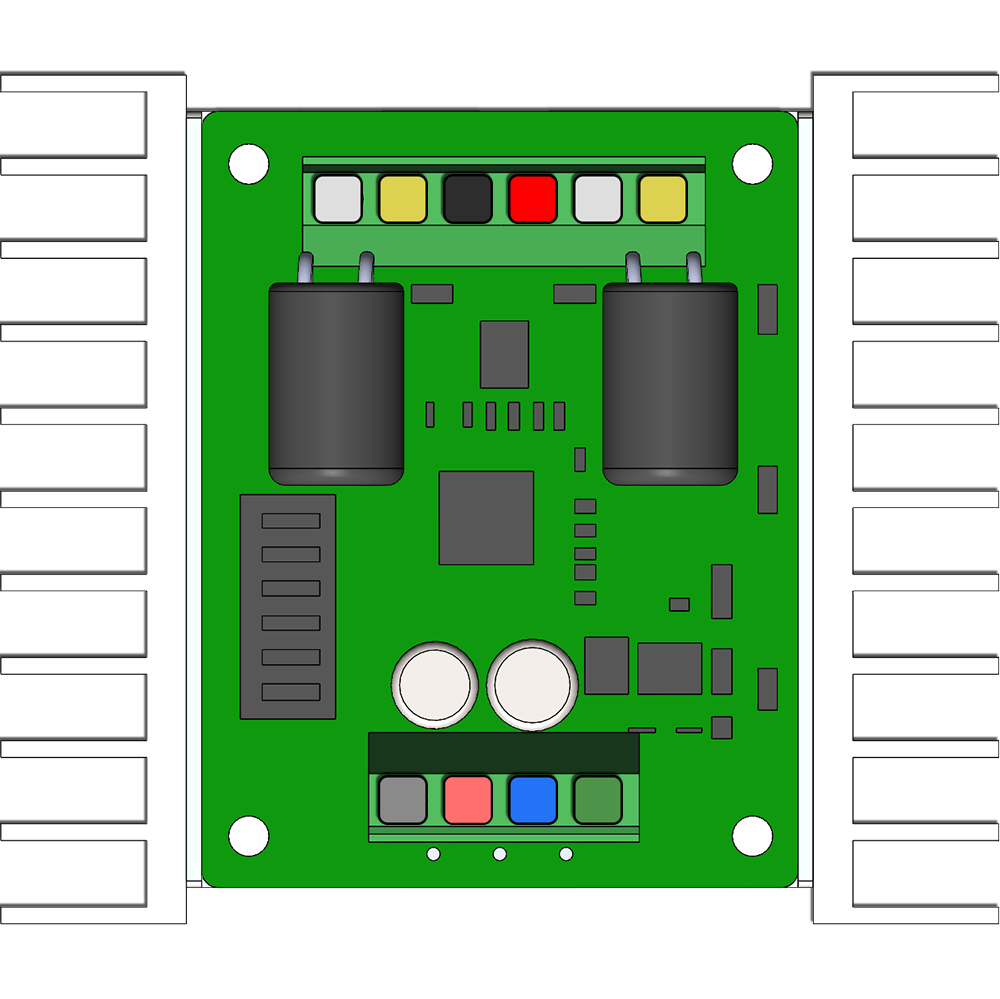
| Sabertooth 2 x 12A | ||
|  | Positive Input (6-24V / 30V Absolute Max) |
 | Negative Input / GND | |
 | M1A / M2A Outputs | |
 | M1B / M2B Outputs | |
 | Positive Output 5V (Max 1A) | |
 | Negative Output / GND | |
 | Signal 1 Input (S1) | |
 | Signal 2 Input (S2) | |
Details regarding the DIP switches can be found on the next page. Complete information available HERE | ||
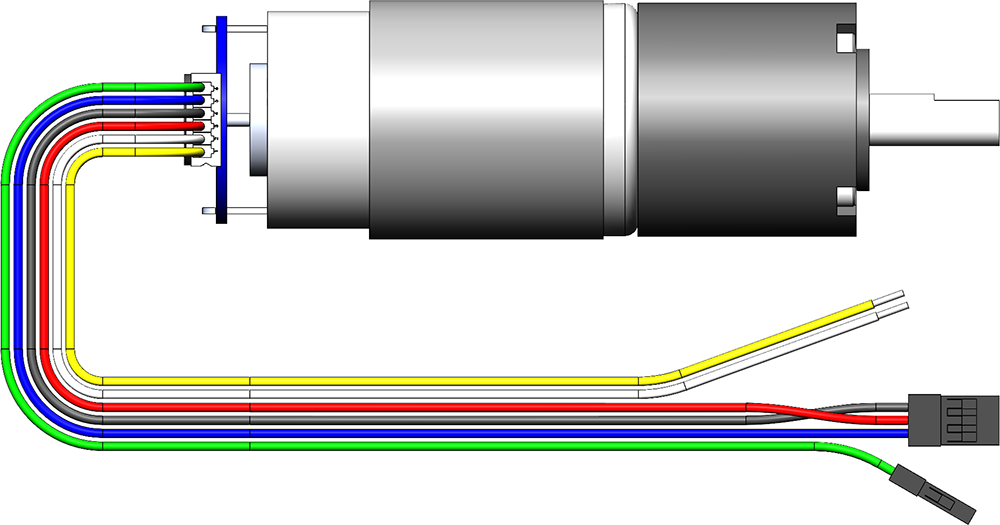
| Gear Motor (36GP 540-51-EN) | ||
| | Motor Positive |
| Motor Negative | |
| Encoder Negative / GND | |
| Encoder Positive (5V) | |
| Encoder Output 1 (Hall Effect) | |
| Encoder Output 2 (Hall Effect) | |
| RC Receiver (RadioLink R8EF) | ||
| | Positive Input & Distribution (5-6V) |
| Negative Input / GND & Distribution | |
| Channel #1 (SBUS Optional) | |
| Channel #2 (PPM Optional) | |
| Channel #3 | |
| Channel #4 | |
| Channel #5 | |
