PGE-50-40 Modular Fingers Assembly
Last modified by Eric Nantel on 2024/07/26 08:36
PGE-50-40 Fingers - Assembly A
Step 1/2




PGE-50-40 Fingers - Assembly B
Step 2/2



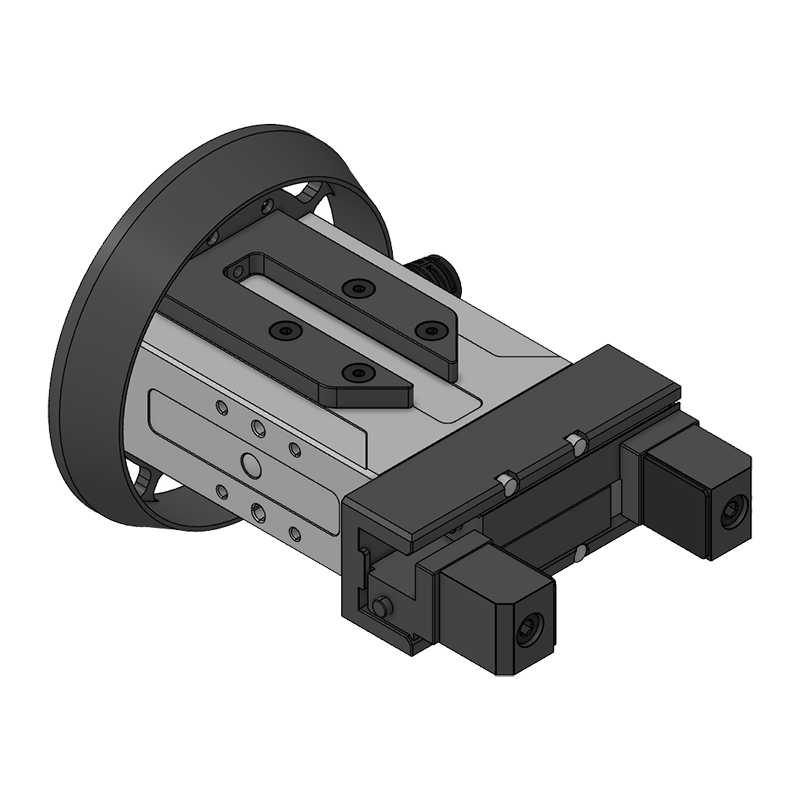
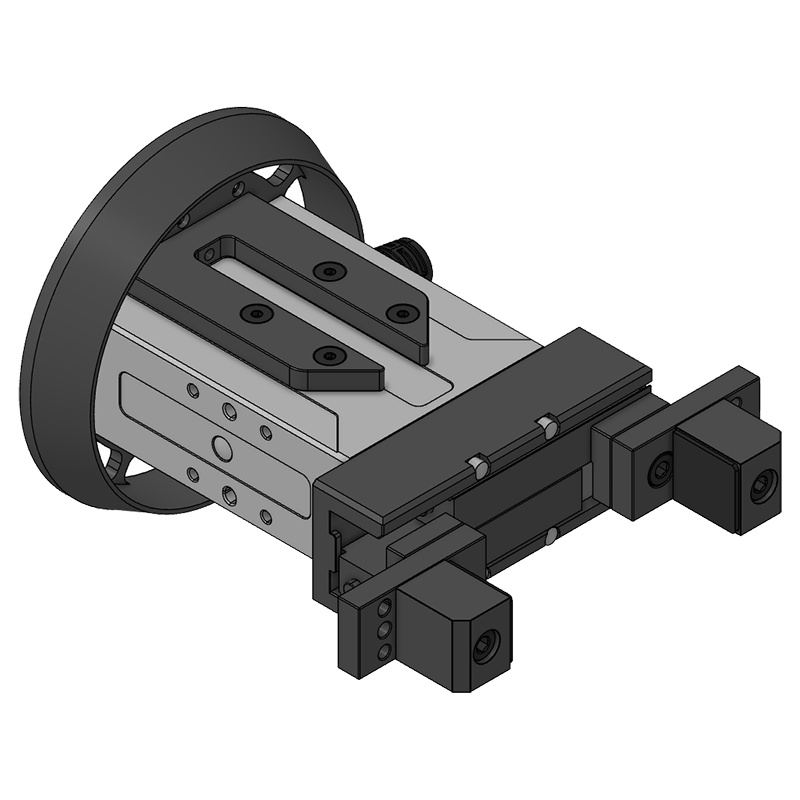
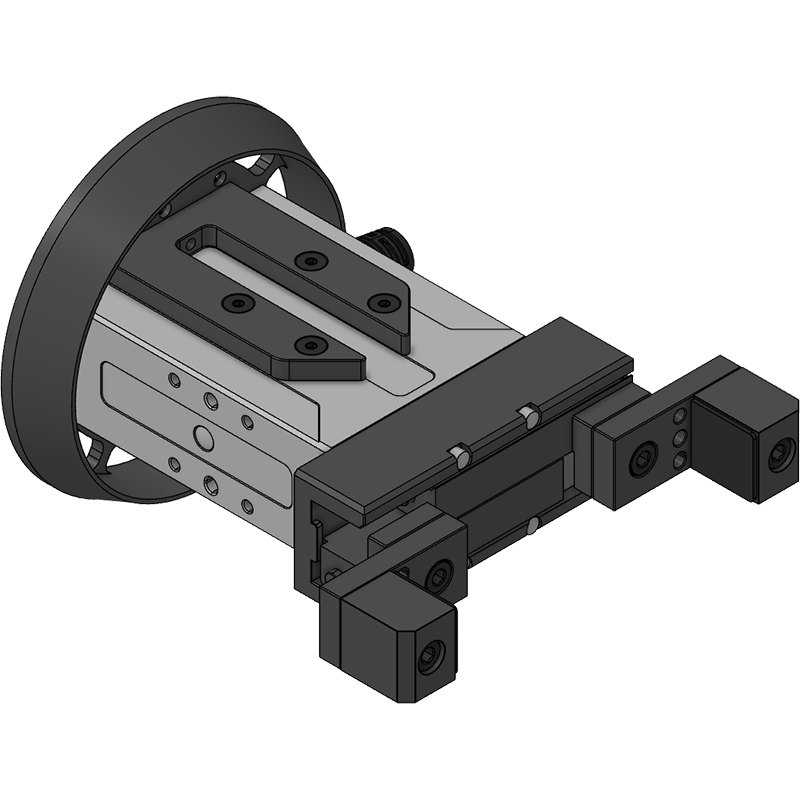
Using the provided parts, it is possible to mount the fingers in three different positions. This allows items of different sizes to be picked.
| Position 1 | Position 2 | Position 3 |
|
|
|