
LSS FlowArm - Setup
Page Contents
Connecting via USB | ||||
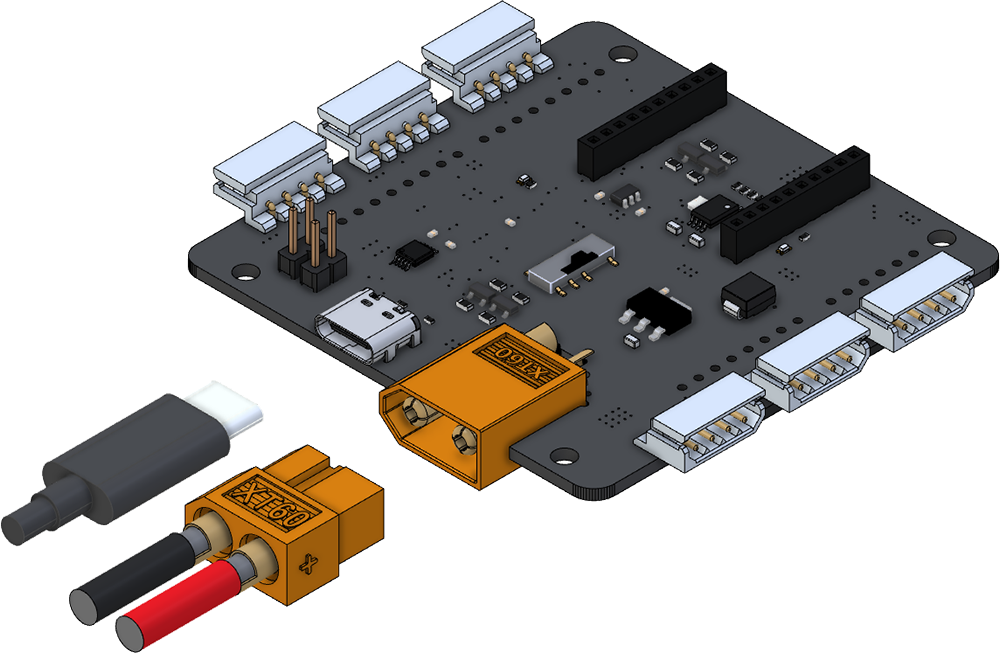
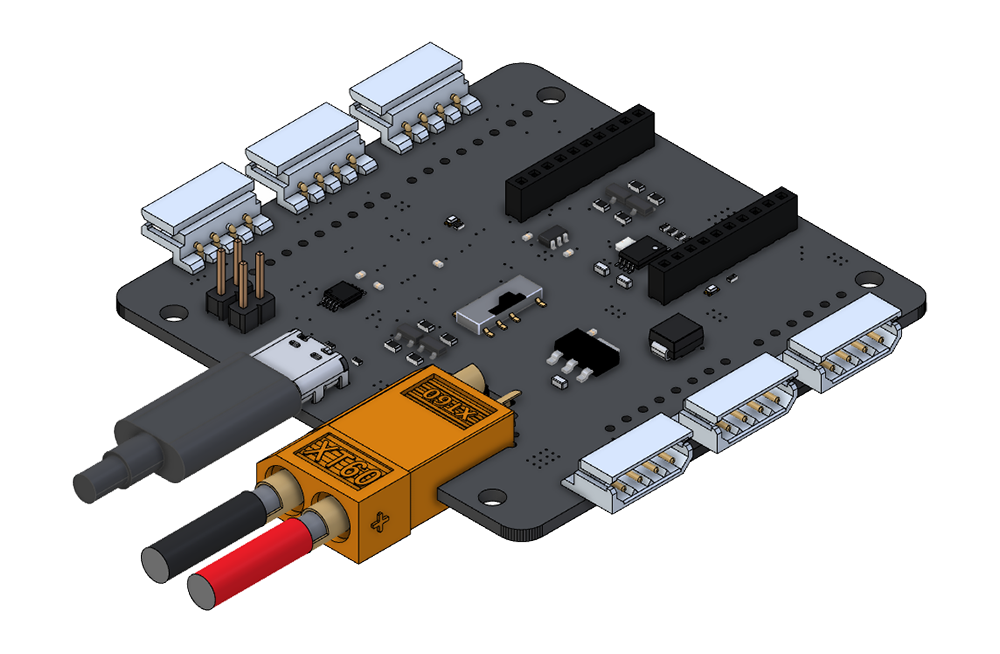
1a. Connect the USB cable to the LSS Adapter and then to the PC 1b. Connect the wall adapter to the LSS Adapter's XT60 plug | ||||
|
| |||
| 2. Power the arm using the power supply's ON/OFF switch. The computer should detect a USB device and prompt you to install the drivers (FTDI or CH340). | ||||
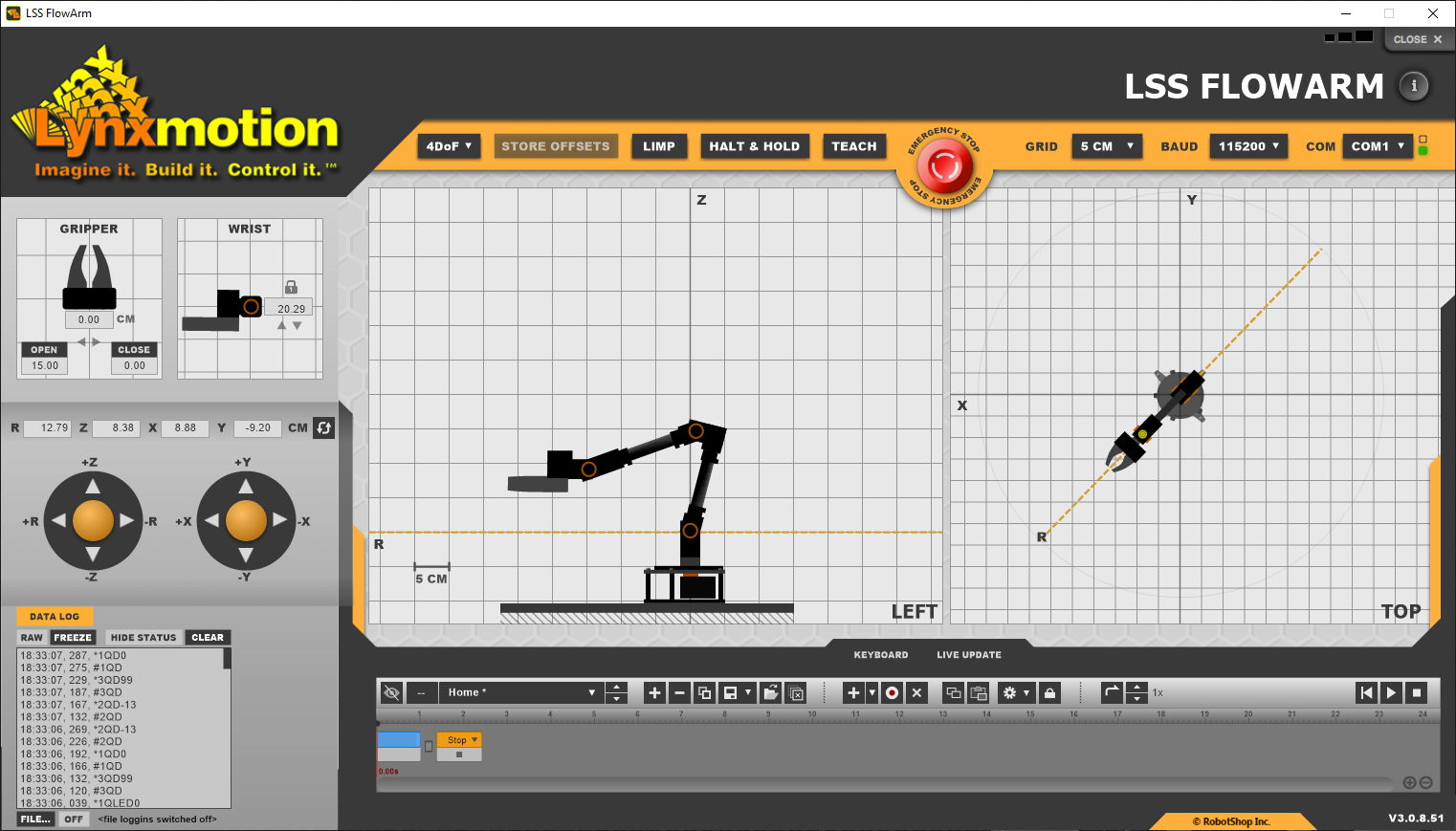
| 3. Start the LSS FlowArm software (available HERE) | ||||
| ||||
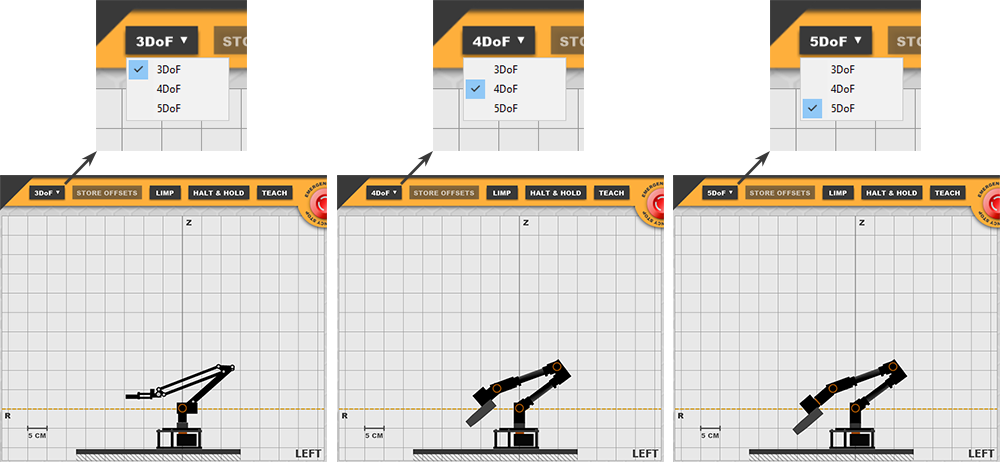
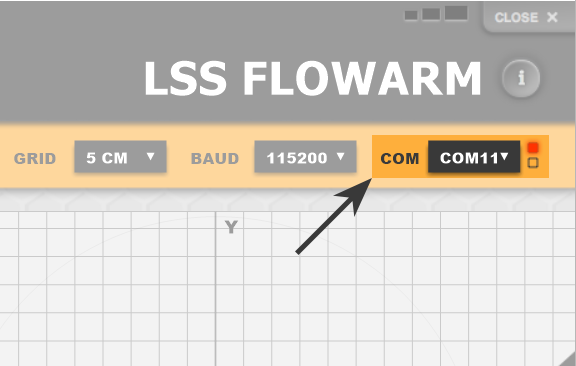
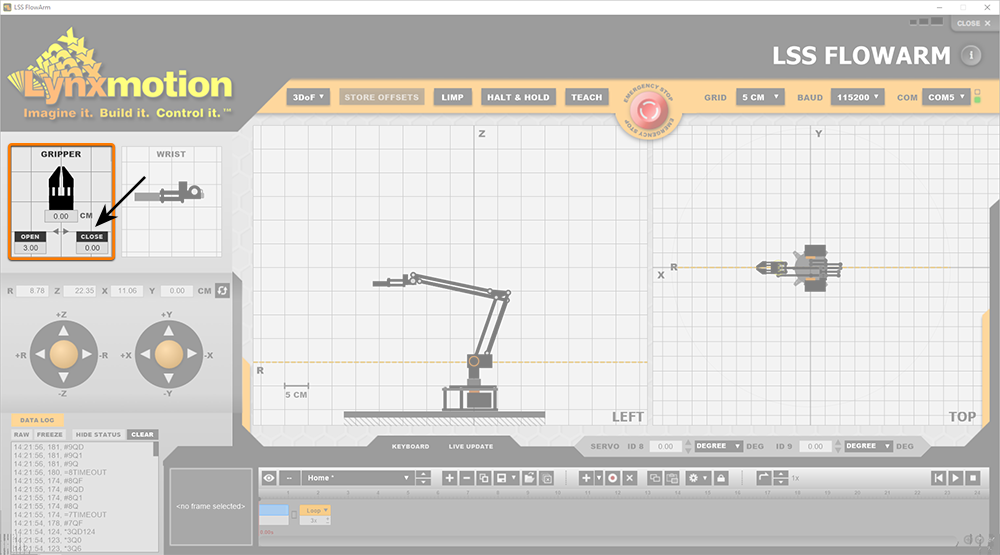
4. Select the type of LSS Arm you are using (3 DoF / 4 DoF / 5 DoF). The software will automatically try to find and connect to the arm. If it is not successful, you can manually choose the appropriate COM port from the drop-down list & select the appropriate baud rate (default is 115200). | ||||
| ||||
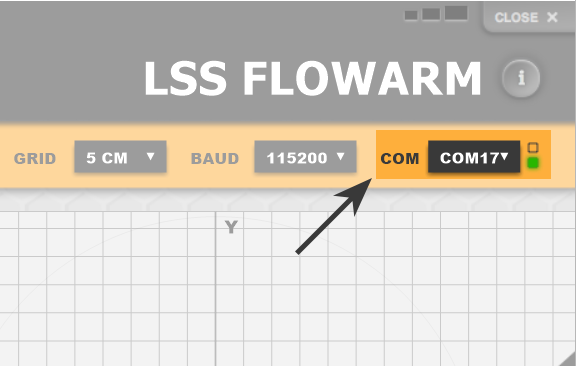
| 5. The software sends a query to servo ID1 and once a reply is received, it determines connection has been established and a green light will be displayed aside the COM port. | ||||
|
| |||
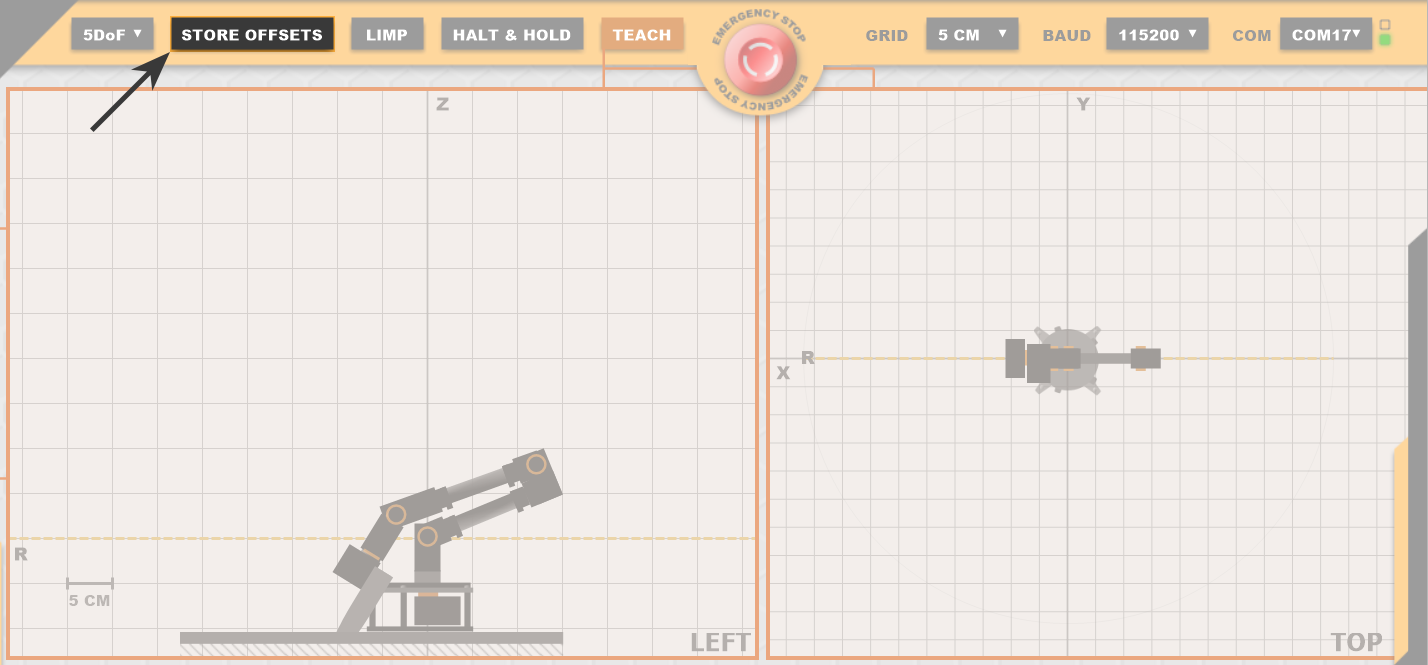
Calibration (Store Offsets) | ||||
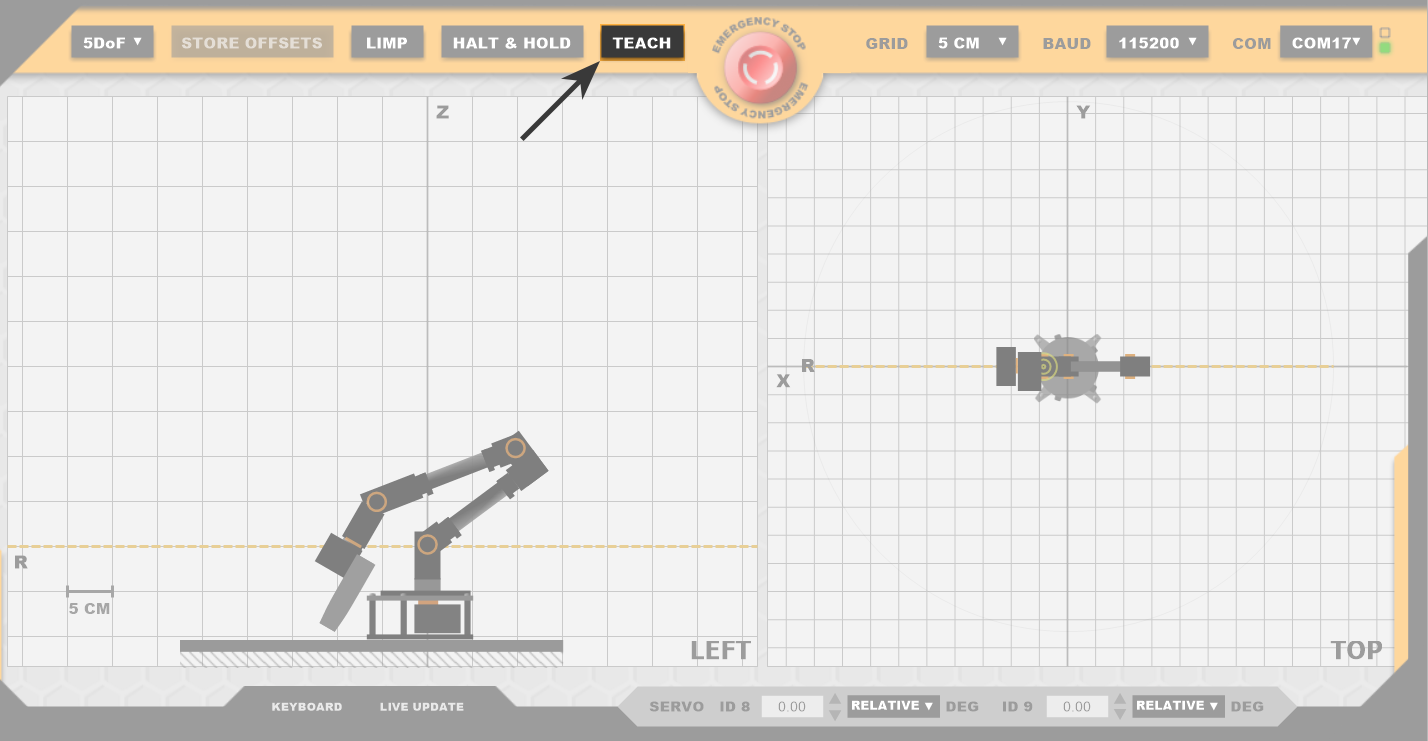
1. Start "TEACH" mode with the button on the top bar. The arm should be limp (i.e. servos are not holing their position) and can be physically moved by hand. | ||||
| ||||
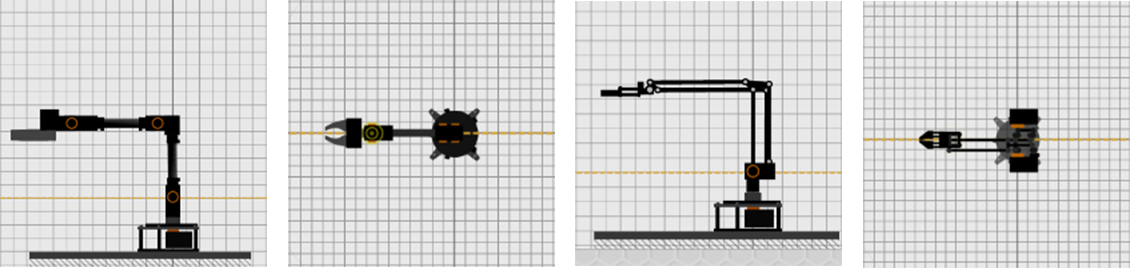
2. Manually place the physical arm in the correct position for your model (shown below) with the gripper fully closed and keep it in this position until the next step is done. | ||||
| 4DoF / 5DoF | 3DoF | |||
| ||||
| 3. Store the values or Offsets by clicking "STORE OFFSETS" | ||||
| ||||
| 4. At this point the arm should "stay" in that position once released (servos will hold their position). | ||||
| 5. Exit the "TEACH" mode by clicking it again | ||||
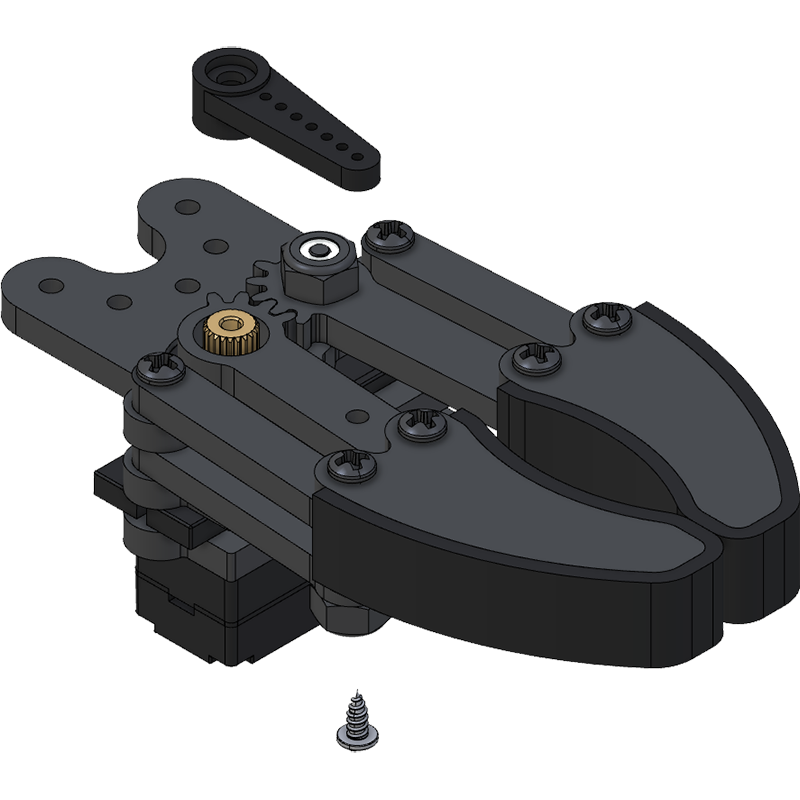
Mini Gripper Setup (for 3DoF Arm) | ||
| 1. With the servo horn removed, set the gripper to it's "Closed" position as follow. | ||
| ||
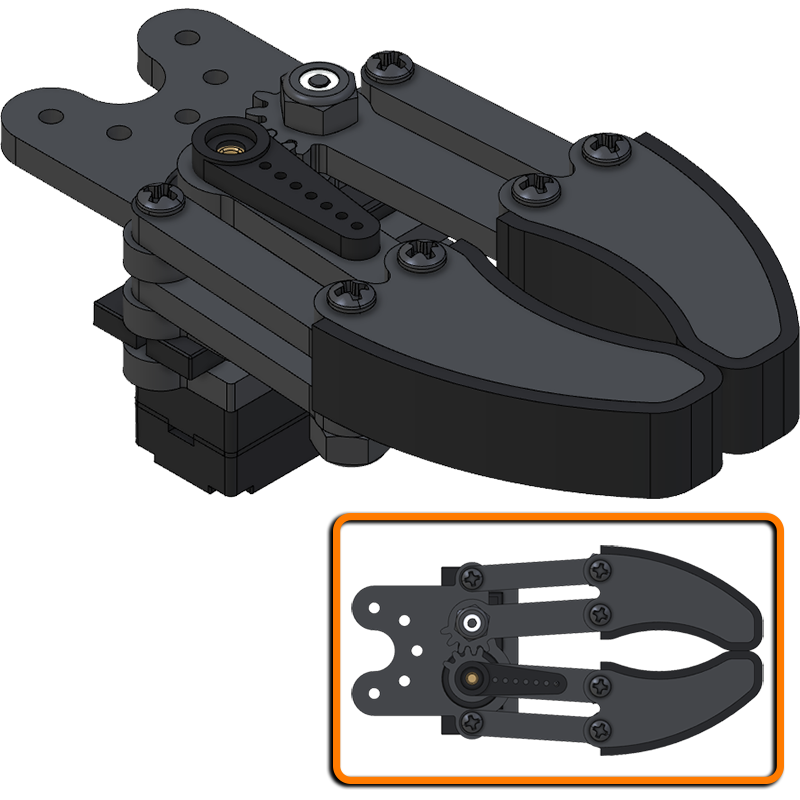
| 2. Mechanically close the gripper, insert the horn and secure it with the screw. | ||
|
| |
| Note: Do not use the screw on the output shaft of the RC servo, this will create friction and it's not needed. | ||
To learn more about the features and functionality of the FlowArm software, click here.
You can also click the information icon (next to LSS FLOWARM) towards the top right for an overlay of all features.