SES-V1 Legged
| AH2 Hexapod The AH2 hexapod robot uses an advanced mechanical advantage leg design. This leg design provides the maximum holding strength with the minimum current draw. The two DOF (degree of freedom) allows this robot to be steered like a tank. Forward, reverse, gradual and in place turning is supported. | |
| MH2 Hexapod The MH2 hexapod robot is designed around a simple mechanical leg design with all metal brackets. This leg design minimizes the number of parts required to make a two DOF (degree of freedom) leg and allows this robot to be steered like a tank. Forward, reverse and in place turning is supported. | |
| Walking-Stick Hexapod (Discontinued) |

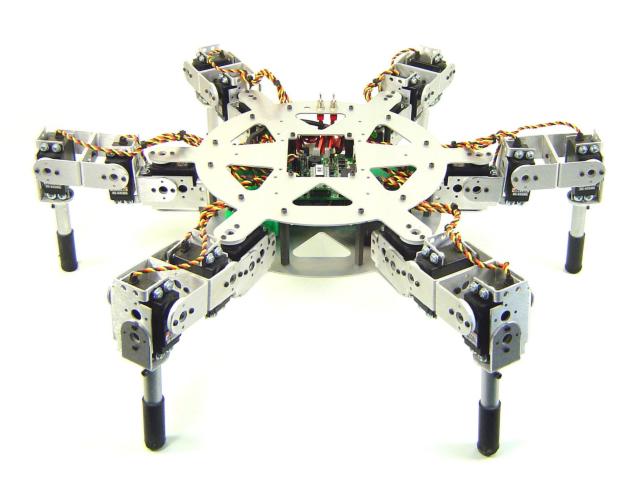
| AH3-R 3DoF Hexapod The AH3-R robot's round body symmetry makes this a very unique hexapod walker. The three DOF (degree of freedom) leg design provides the flexibility required to walk in any direction! The robot uses 18 HS-645 servos for the legs. | |
| MAH3-R 3DoF Hexapod The MAH3-R is the largest of the AH3 series. The robot's round body symmetry makes this a very unique hexapod walker. The three DOF (degree of freedom) leg design provides the flexibility required to walk in any direction! The robot uses 18 HS-755 servos for the legs. | |
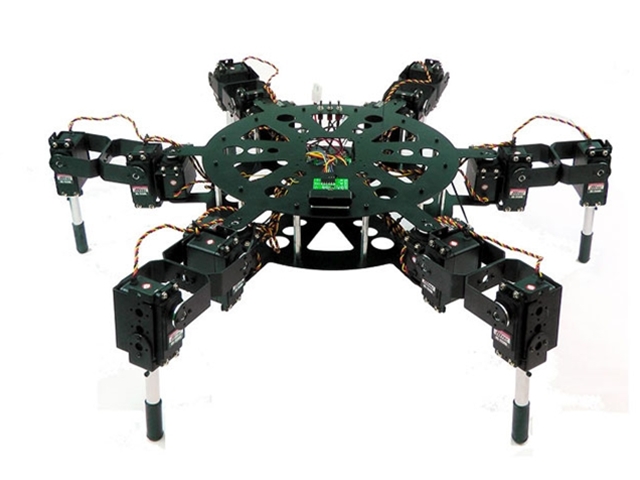
| BH3-R 3DoF Hexapod The BH3-R robot's round body symmetry makes this a very unique hexapod walker. The three DOF (degree of freedom) leg design provides the flexibility required to walk in any direction! The robot uses 18 HS-475 / HS-485 servos for the legs. | |
| CH3-R 3DoF Hexapod The CH3-R robot's round body symmetry makes this a very unique hexapod walker. The three DOF (degree of freedom) leg design provides the flexibility required to walk in any direction! The robot uses 18 HS-475 / HS-485 servos for the legs. | |
| A-Pod 3DoF Hexapod The A-Pod robot's body is insect inspired. The angled legs provides additional range of movement. The three DOF (degree of freedom) leg design means the robot can walk in any direction! The robot has been designed to use 18 HS-645 servos for the legs and an additional 7 servos for the head and tail. | |
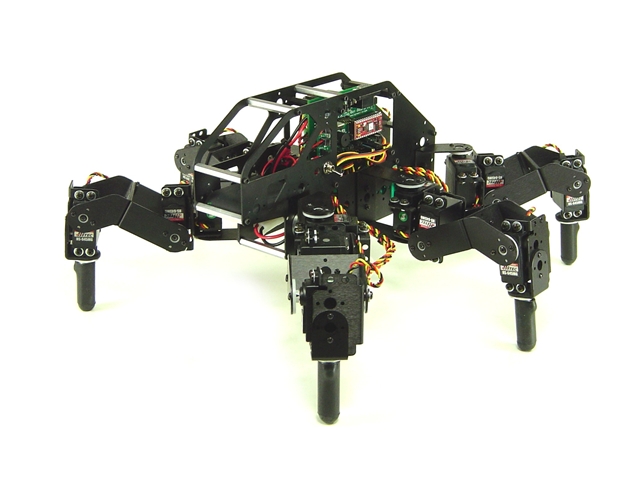
| T-Hex 3DoF Hexapod The T-Hex robot's body is Mech inspired. The use of offset brackets on the legs provides additional range of movement. The three DOF (degree of freedom) leg design means the robot can walk in any direction! The robot has been designed to use 18x HS-645 servos for the legs. | |
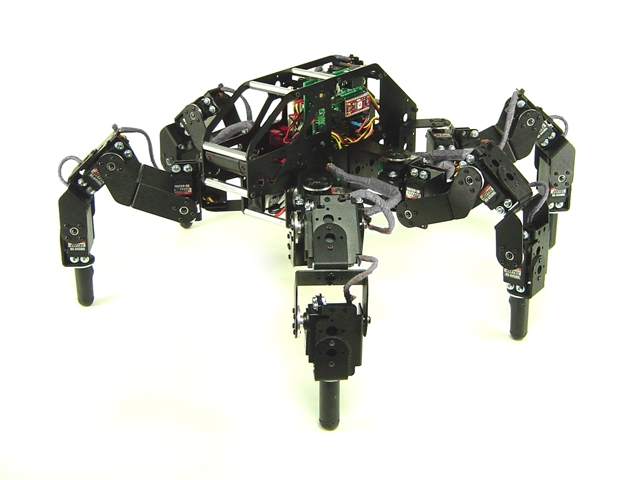
| T-Hex 4DoF Hexapod The T-Hex robot's body is Mech inspired. The use of offset brackets on the legs provides additional range of movement. The four DOF (degree of freedom) leg design means the robot can walk in any direction, just like the 3DOF version. But the 4th axis really expands the dynamic range of the robot's range of motion! The robot has been designed to use 24 HS-645 servos for the legs. | |
| Phoenix 3DoF Hexapod The Phoenix Hexapod Robot has a more natural looking, more articulate leg and body design. The three DOF (degree of freedom) leg design means this robot can walk in any direction! The robot uses 18 Hitec HS-645 servos. | |
| BH3 3DoF Hexapod The BH3 robot offers the most advanced leg design available today. The three DOF (degree of freedom) leg design means this robot can walk in any direction! The robot uses 18 Hitec HS-475 / HS-485 servos for the legs. |





| BRAT Biped BRAT stands for Bipedal Robotic Articulating Transport. The robot is a 6 servo biped walker featuring three degrees of freedom (DOF) per leg. The robot can walk forward or backwards and turn in place left or right with variable speed. | |
| BRAT Jr. Biped | |
| Pete Humanoid The Lynxmotion Pete humanoid biped robot is a 22 DoF R/C servo based biped walker with gripper hands as the default configuration. This enables Pete to walk forward or backwards, turn in place left or right with variable speed. | |
| Scout Biped The Lynx Scout robot is a twelve servo biped walker featuring six degrees of freedom (DOF) per leg. The advanced leg design features incredible flexibility. |

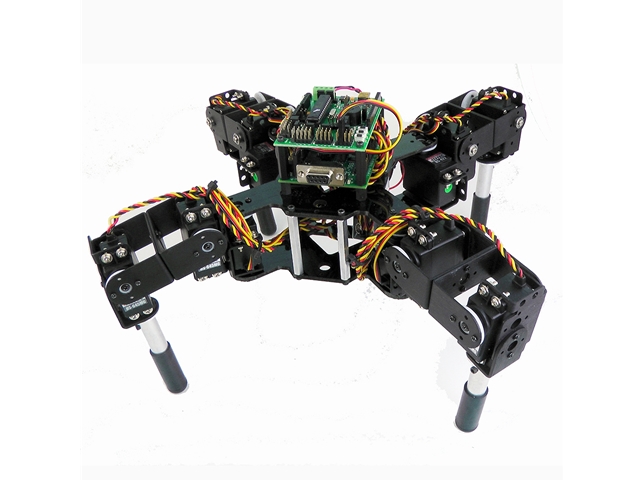
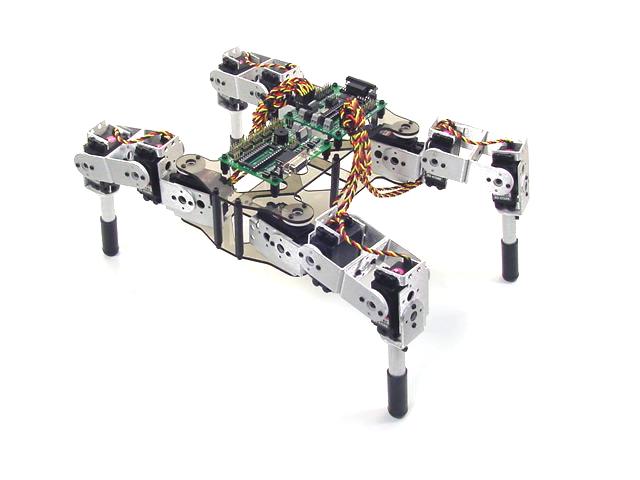
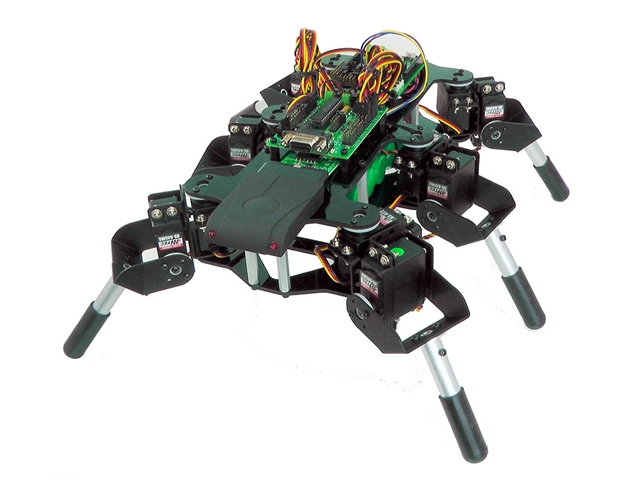
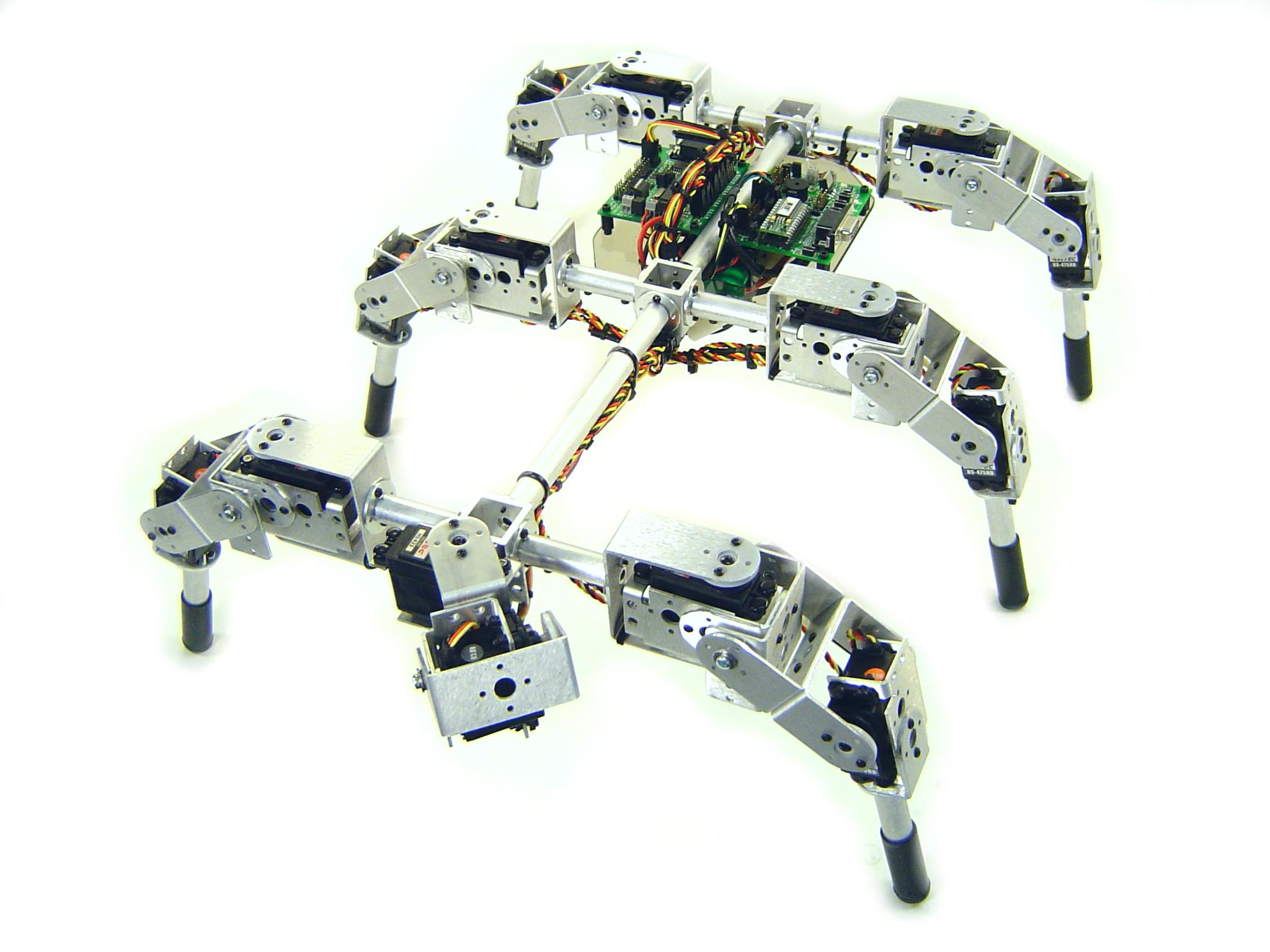
| SQ3 Symmetric Quad The SQ3 is a 3DoF per leg quadruped robot with a symmetric body design. The robot's symmetry makes this a very unique quadruped walker. The three DOF (degree of freedom) leg design provides the flexibility required to walk in any direction! | |
| 3DOF Mini Quad |