
BH3 3DoF Hexapod


Table of Contents
Description
About the BH3 Walking Robot The Mechanics Controlling the Robot Powering Options Important! |
|
|
|


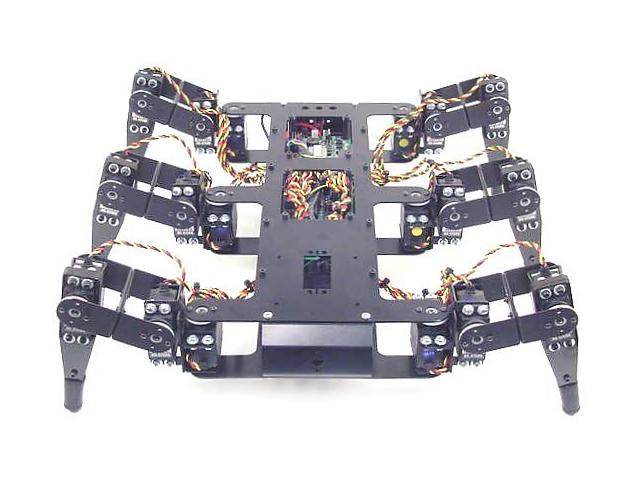
Specifications
- Servo motion control = local closed loop
- Steering = omnidirectional
- Number of legs = 6
- Degrees of freedom per leg = 3
- Motion speed = 10"/S
- Height (body) = 2.00"
- Height (overall) = up to 6.25"
- Width (body) = 3.50"
- Width (overall) = 14.00"
- Length (body) = 13.00"
- Length (overall) = 14.50"
- Weight (w/out batteries) = 4lb 2oz.
- Ground clearance = up to 4.00"
User Guide
General
- Polycarbonate Information Page
- RC Servo Mid Position Tutorial
- RC Servo Mini-Guide
- RC Digital Servo End Stops (HFP-10)
BH3 Information
- 3DoF Lexan Leg Assembly Instructions v3.0
- BH3 3DoF Body Assembly Instructions v2.0
- The Complete H3/H3-R Tutorial (BotBoarduino) v2.0
Additional Information
- BH3 3DoF Body Assembly Instructions v1.0
- The Complete H3/H3-R Tutorial (Bot Board II) v2.0
- The Complete H3/H3-R Tutorial (Bot Board II) v1.0
- The Complete H3/H3-R Tutorial (Mini-ABB) v1.0
- PowerPod Utility Software
- BASIC Atom Pro Programming Tutorial
- BASIC Micro Studio Programming Tutorial for BASIC Atom Pro