
Phoenix Excel for SEQ-01
Last modified by Eric Nantel on 2026/04/06 14:30
⭐ Community Spotlight — Share your Lynxmotion-based robot project to be featured here!
Phoenix Hexapod
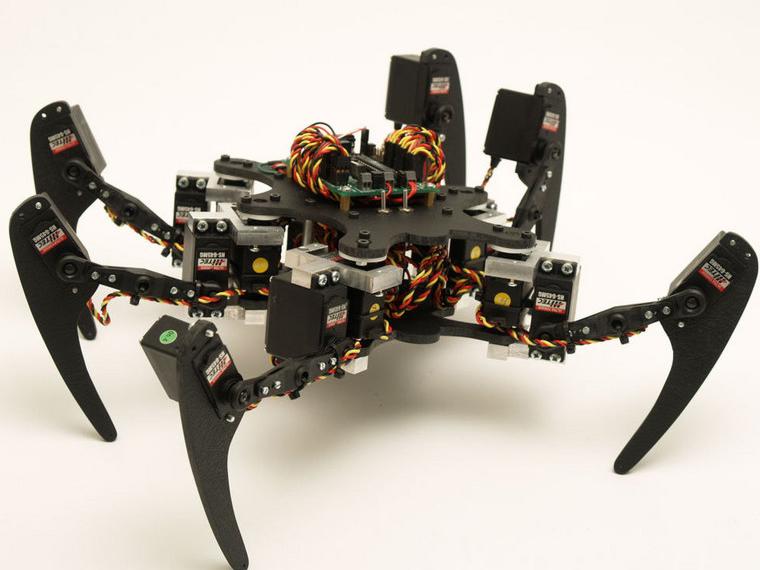

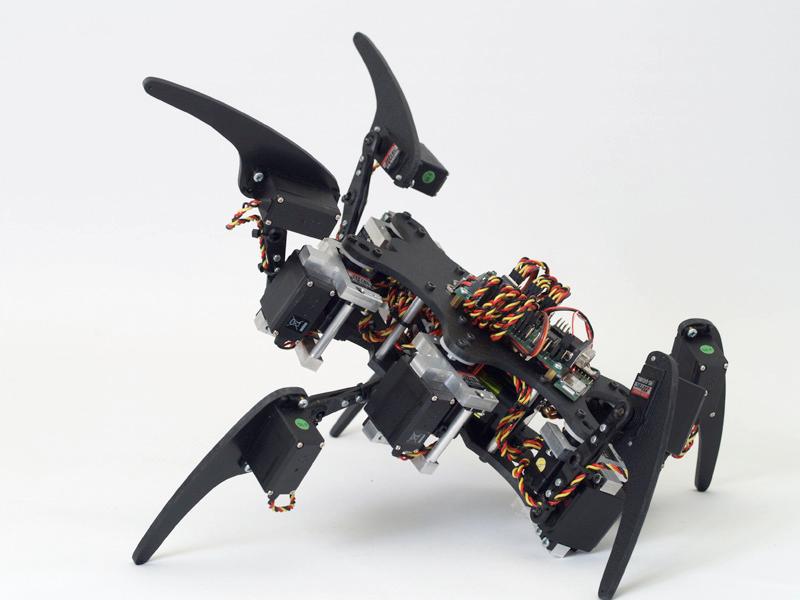

Phoenix is a hexapod robot with 3DOF per leg. Hardware consists of an SSC-32, 18 servos, and a BlueSMiRF Bluetooth interface. The PC software is the Visual Sequencer paired with a custom MS Excel spreadsheet called PEP (Phoenix Excel Program).
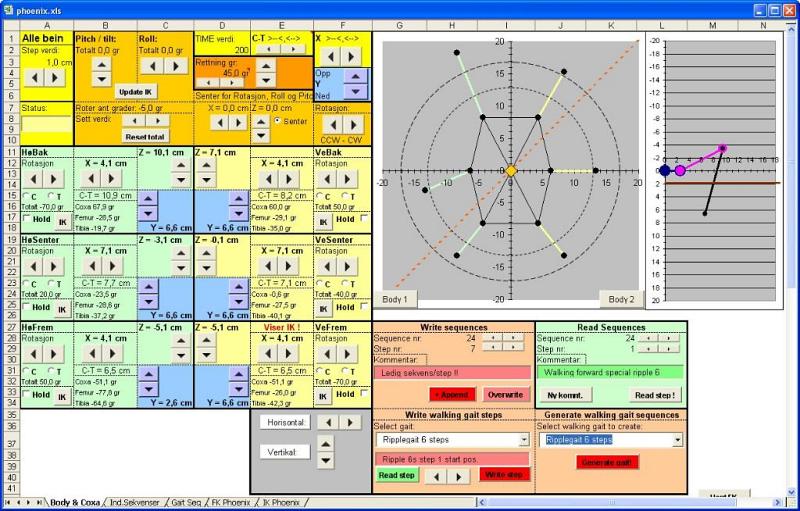
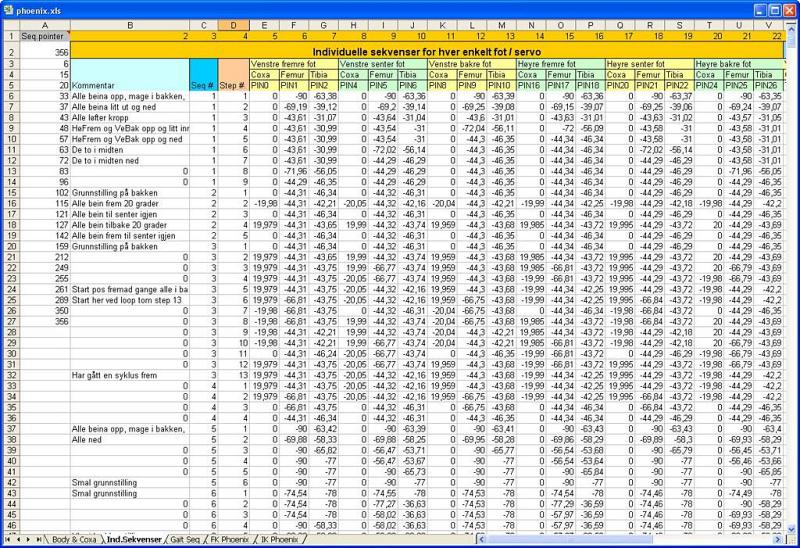
PEP handles forward and inverse kinematics and body rotation along all axes. Walking direction and center of rotation can be freely defined — for example, you can set the center of rotation at the center of the left forward foot. Most importantly, PEP can generate sequences and walking gaits that export directly as .csv files for import into the Visual Sequencer.
PEP Software Screenshots
PEP Downloads
PEP v2.02 BETA — Lynxmotion-Phoenix Compatible Excel Sheet
- Live SSC-32 control (beta)
- Forward kinematics control for all legs (new spin buttons, femur and tibia angles)
- "Swap LF ↔ RF" button — swaps FK values between right and left front legs for waving sequences
- "Lock to Read" button — locks sequence and step number to read-sequence values for easy editing
- Setup section — calibrate min/max angles per servo; set COM port and baud rate
Pre-Made Sequences
Videos