
The Complete H3/H3-R Tutorial (Bot Board II) v2.0
The Complete H3/H3-R Tutorial v2.0
Updated February 8, 2012
This guide applies to the Bot Board II. The purpose is to use the Hexapod Calibration program to calibrate the servos and program the Basic Atom Pro 28 for PS2 remote control.
Note: PS2 control programs have been verified to work with Lynxmotion wireless controllers. Non-Lynxmotion controllers cannot be guaranteed.

AH3-R

BH3-R

BH3

CH3-R
Hardware & Software
Hardware: SSC-32 / Bot Board II | BASIC Atom Pro 28 | PS2 Cable / PS2 Wireless Controller | Hexapod 3 / 3-R
Software: Hexapod Calibration | Basic Micro Studio
Download the Hexapod Calibration program. Unzip the file and run the installer — this will create a desktop icon for easy access.
 Figure 1.
Figure 1.
Connect the serial data cable to the PC's serial port (9 pins that stick out). The USB to Serial adapter cable on our website is guaranteed to work — other brands or models may not communicate quickly enough to function properly.
Please consult the serial troubleshooting guide if you have difficulties.
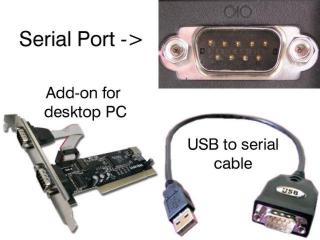 Figure 2.
Figure 2.
Set the robot up on a stand such as a CD spindle. Connect the DB9 or USB-to-serial cable to your PC and to the SSC-32. Power up the robot. Verify that the green LED on the SSC-32 lights up — this indicates the SSC-32 is functioning properly (not a power indicator). It remains lit until it receives serial data, then blinks when receiving data. The servos may jump but will not hold position yet.
 Figure 3-1.
Figure 3-1.
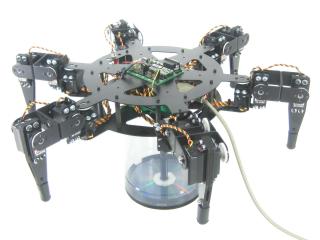 Figure 3-2.
Figure 3-2.
Open the Hexapod Calibration program. It will automatically detect a connected SSC-32 on ports 1–30 and display the firmware version when connected.
Click "All=1500" to enable the servos. The robot's legs should move quickly into position (Figures 3-1 or 3-2) and hold. If they go limp after moving, this indicates a low battery — the SSC-32's green LED will be steady as a clue.
If the legs look radically different, remove the center servo horn screw, pull the horn off, reposition it, and replace the screw. Don't worry if the legs are off by less than 15° — this will be corrected in the offset procedure.
Note: click "inline" if you do not have a circular chassis for a more accurate visual representation.
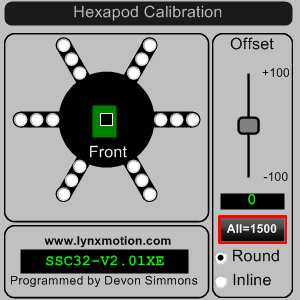 Figure 4.
Figure 4.
Use the servo offset adjustment to fine-tune leg alignment. The goal is to align each leg perpendicular to the chassis with the knee forming a perfect right angle (see Figures 5-1 and 5-2).
Select a hip servo by clicking the corresponding radio button. Move the Offset slider — use the scroll wheel or arrow keys for fine tuning. After aligning the hip, move to the next closest servo to the body, and finally adjust the knee servo last. Previously adjusted servos are marked red to show your progress. Repeat for all legs.
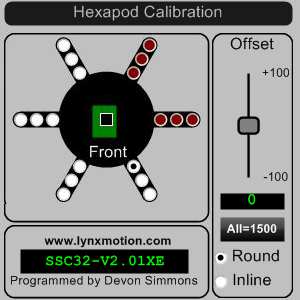 Figure 5.
Figure 5.
 Figure 5-1.
Figure 5-1.
 Figure 5-2.
Figure 5-2.
Remove the DB9-enable jumpers and install the DC-01 with the narrow (0.1") spaced connector on the TTL serial communication posts. The black wire is closest to the edge of the board, and the yellow wire is on RX.
See the schematic below for detailed information.
 Figure 6.
Figure 6.
For the round chassis, remove the 3/8 x 4-40 screws holding the SSC-32 and install the Bot Board using the same screws. Attach the red and black wires from the SSC-32 to the VL input, with black on (−) and red on (+).
For both chassis styles: remove the ABC buttons / LED jumpers. Install the speaker enable jumper. Install the DC-01 to I/O P8 with black toward the outside and yellow on the I/O pin. Consult the Bot Board II manual if needed.
See the schematic below for detailed information.
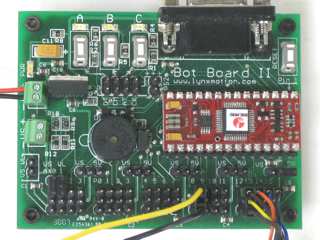 Figure 7.
Figure 7.
Install the Playstation 2 cable as illustrated in Figure 8-1. Refer only to Figure 8-1 for connection information — cable colors may be outdated. If your cable's colors don't match the diagram, find a complete listing of possible colors here.
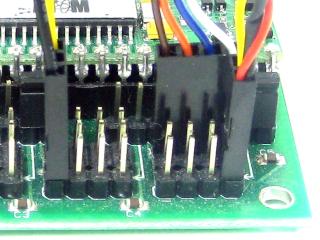 Figure 8-2.
Figure 8-2.
Figure 8-1.
Schematic. Double check your connections against the schematic below.
| Servo Letter Definitions | ||
|---|---|---|
| Left Right |
Rear Middle Front |
Knee Vertical Horizontal |
Schematic.
Use some double-sided foam tape to stick the PS2 cable on the bottom of the robot as shown. This makes it easier to swap controllers if needed.
 Figure 9.
Figure 9.
Download BASIC Micro Studio. Install and run the program to allow programming the chip. Consult the serial troubleshooting guide if you have difficulties. Select the proper code for your robot from Table 10 below.
 Figure 10.
Figure 10.
BASIC Atom Pro Program Downloads (Table 10)
| Chassis Style | Leg Style | Download |
|---|---|---|
| Round | A | rounda.zip |
| Round | B | roundb.zip |
| Round | C | roundc.zip |
| Inline | B | inlineb.zip |
Make sure your PS2 controller is on. The software switches it to analog mode automatically, but some controllers may need this done manually. Continuous beeping means the PS2 controller is not connected — test it with a PlayStation 2 to verify.
Shoulder buttons (L1, L2, R1, R2) adjust height, leg lift, and gait speed. Default is Walking mode. Right joystick for translation, Left joystick X-axis rotates, Left joystick Y-axis changes ride height (L3 locks it). Press Select to switch between Walking and Body Move mode.
Servo on Pin 31 auto-pans in the walking direction. Servos on Pins 29/30 add pan/tilt or Little Grip control (Body Move mode only).
| Button | Walking Mode (default) |
|---|---|
| Select | Switch modes |
| Right Joystick | Speed and direction for translation |
| Left Joystick | X-Axis: Rotational movement | Y-Axis: Ride height |
| L1 | Preset: Tile Floor |
| L2 | Preset: Default |
| L3 | Locks ride height |
| R1 | Preset: Tall Grass |
| R2 | Preset: Body Low |
| R3 | Horn |
| Start | Knee angle shift (max ground clearance) |
| D-Pad L/R | Left: Speed increase | Right: Speed decrease |
| D-Pad U/D | Up: Leg lift increase | Down: Leg lift decrease |
| △ Triangle | Lowers body then removes servo pulses. Press again to return (cold start). |
| O Circle | All servos = 1500mS |
| X | "Attack Mode" |
| □ Square | "Learning to Fly" |
| Button | Body Move Mode |
| Select | Switch modes |
| Right Joystick | Move body horizontally (two axis translation) |
| Left Joystick | See text above |
| L3 | Change Left Joystick function |
| R3 | Horn |
| D-Pad L/R | Left: Speed increase | Right: Speed decrease |
| D-Pad U/D | Up: Leg lift increase | Down: Leg lift decrease (affects Walking mode only) |
| △ Triangle | Lowers body then removes servo pulses. Press again to return. |
| O Circle | All servos = 1500mS |
| X | "Attack Mode" |
| □ Square | "Learning to Fly" |
Table 11.