
AL5A Arm Assembly Instructions Rev. 2.1
AL5A Arm Assembly Instructions Rev. 2.1
Updated December 2014
Safety first! Wear eye protection and never touch a powered robot!
This guide shows how to assemble the AL5A arm with either the SSC-32 or the SSC-32U servo controller. Calibration can be done using one of the following software options: SSC-32 Servo Sequencer Utility · RIOS (purchased separately or as part of a kit) · Lynxterm (legacy software)
Note: Loctite / thread lock can be used on aluminum components, though it is not necessary if nuts are properly tightened. Do not use on Lexan or plastic parts.

Complete arm (SSC-32 shown).
The Lexan pieces have a protective covering that must be removed before assembly. The laser cut melts the covering into the cut edge, making removal difficult. Gently scrape the cut edge with a flat blade screwdriver to lift and peel the covering off.
On smaller pieces, use duct tape to lift the covering after scraping the edge. For further information on Lexan, see this page.
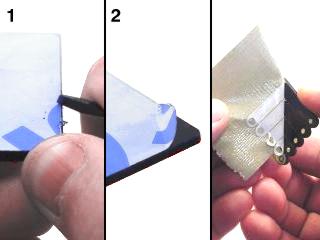 Lexan Preparation.
Lexan Preparation.
Connect the standard "C" bracket to the large "C" bracket as shown. Use two 2-56 x 1/4" screws and 2-56 nuts.
 Figure 1.
Figure 1.
Install the mechanical dampening panels as shown using four 2-56 x 1/4" machine screws. Ensure the protective covering has been removed from the Lexan parts. Add the discs to the correct side. Press down when screwing to ensure no gap between the Lexan and aluminum — the screw threads the Lexan.
 Figure 2.
Figure 2.
Insert the 4-40 x .5" Phillips head screw through the hole in the multi-purpose bracket as shown. Secure with a steel nut.
 Figure 3.
Figure 3.
Slide the large "C" bracket end of the bracket assembly over the screw as shown, and secure with a nylon insert lock nut. Start with the nut loose — tighten only if the arm wobbles. Caution: do not over-tighten! If the mechanical dampeners are too tight the servo WILL heat up and CAN be damaged!
 Figure 4.
Figure 4.
Replace the black servo horn on the HS-755HB servo with the round nylon servo horn included in the hardware bag. Remove the servo horn screw without rotating the horn, pull the horn off, press the nylon horn in place as close to the alignment shown as possible, and replace the screw. The arrows point to the screw holes you will use.
 Figure 5.
Figure 5.
Attach the HS-755HB servo to the base bracket using the 3mm hardware per the diagram below. Use two #2 x 1/4" tapping screws to secure the bracket to the servo horn. Route the shoulder servo wires underneath the servo. Plug the servo into channel 1 on the SSC-32. Rotate the base to an extreme and use a wire tie to take up cable slack.

 Figure 6.
Figure 6.
Attach two tubing connector hubs to the short side of the "L" brackets using four 2-56 x .250 screws and 2-56 nuts (two each). Orientation is important — the hole in the tube must be positioned as shown so the tube will line up correctly in Figure 8.
 Figure 7.
Figure 7.
Connect the hubs to the 1.50" tube using two 4-40 x .250" screws. Tighten these down firmly.
 Figure 8.
Figure 8.
Attach each end of the tubing structure to two standard-sized Multi-Purpose brackets using four 2-56 x .250 screws and 2-56 nuts (two each).
 Figure 9.
Figure 9.
Insert the 4-40 x .5" Phillips head screw through the hole in the multi-purpose bracket as shown. Secure with a steel nut.
 Figure 10.
Figure 10.
Slide the screw on the forearm assembly through the dampening discs as shown, and secure with a nylon insert lock nut. Start loose and tighten only if the arm wobbles. Caution: do not over-tighten! If the dampeners are too tight the servo WILL heat up and CAN be damaged!
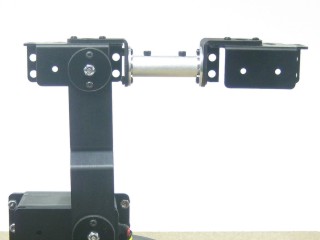 Figure 11.
Figure 11.
Verify that your standard-size servo output horn is at center position as shown. The arrows point to the screw holes you will use.
 Figure 12.
Figure 12.
Attach the HS-645HB elbow servo to the bracket using the 3mm hardware per the diagram below. Use two #2 x 1/4" tapping screws to secure the bracket to the servo horn. Route the elbow servo wires over the servo. Plug the servo into channel 2 on the SSC-32.
 Figure 13.
Figure 13.
Attach the Little Gripper connector to the Short "C" bracket using two 2-56 x .250" screws and 2-56 nuts.
 Figure 14.
Figure 14.
Attach the short "C" bracket to the other Multi-Purpose bracket as shown. Refer to Figure 15-1 for detailed ball bearing installation information.
 Figure 15-1.
Figure 15-1.
 Figure 15-2.
Figure 15-2.
Attach the HS-422 wrist servo to the bracket using the 3mm hardware per the diagram below. Use two #2 x 1/4" tapping screws to secure the bracket to the servo horn. Route the wires over the servo.
 Figure 16.
Figure 16.
Step 17: Attach the Little Grip to the Lexan using three 4-40 x .375" button head screws and acorn locking nuts. Only three screws are used — the gripper servo body blocks the fourth position.
Align the HS-422 servo to mid-position with the gripper halfway open. Remove the servo screw and horn. Slide the servo into the gripper from the bottom, wiggling gently to seat it. Replace the servo screw — tighten, then unscrew half a turn. Too much friction can bind the servo.
Step 18: Add 6" servo extender cables to the wrist and gripper servos.
 Figure 17.
Figure 17.
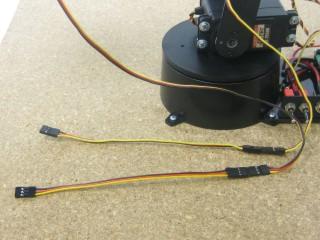 Figure 18.
Figure 18.
Carefully bend the wrist servo back as far as it will go and use wire ties to secure the servo cables as shown. Leave slack in the gripper servo cable — do not pull it too tight.
 Figure 19.
Figure 19.
Carefully stretch the arm forward as far as it will go and use wire ties to secure the cables as shown. Leave slack — do not pull too tight. Plug the servos into the SSC-32 according to Table 20.
 Figure 20.
Figure 20.
SSC-32 Servo Channel Assignments (Table 20)
| SSC-32 Ch. | Servo |
|---|---|
| 00 | Base |
| 01 | Shoulder |
| 02 | Elbow |
| 03 | Wrist |
| 04 | Gripper |
| 05 | Wrist Rotate (optional) |
SSC-32 (Serial) — Step 21a
Download and install LynxTerm. Connect the SSC-32 to the serial port and apply power. The green LED should light up. Run LynxTerm. Consult the serial troubleshooting guide if needed. Select each channel 0–4 and test carefully with the slider bar.
SSC-32U (USB) — Step 21b
Download and install the SSC-32 Servo Sequencer Utility. Connect the USB cable and power the board. Set baud rate to 9600. The software auto-detects the COM port with FTDI drivers. Ensure servos 0–4 are checked, then use the sliders to test each servo. Consult the SSC32 Servo Sequencer Guide for more information.
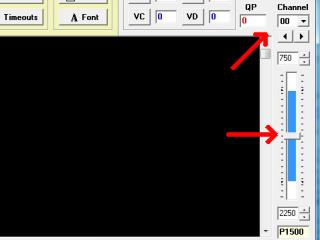 Figure 21a (LynxTerm).
Figure 21a (LynxTerm).
 Figure 21b (SSC-32 Utility).
Figure 21b (SSC-32 Utility).
SSC-32 (Serial) — Step 22a
Click "All = 1500" in LynxTerm. The arm should look like Figure 22. If any joint is off by more than 15°, check your assembly. If you did not purchase RIOS software, proceed to Step 27.
SSC-32U (USB) — Step 22b
Click "Calibrate" in the SSC-32 Servo Sequencer Utility. A knob appears next to each servo — click and drag up/down to rotate each knob until the arm matches Figure 22 with 90° and 180° angles. If any joint is off by more than 15°, check your assembly. Once aligned, click "Calibrate" again to store the offset values. If you did not purchase RIOS, proceed to Step 27.
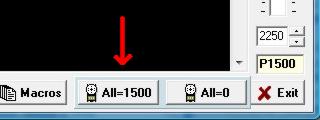 Figure 22a (LynxTerm — All=1500).
Figure 22a (LynxTerm — All=1500).
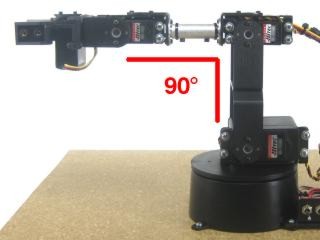 Figure 22 (target position).
Figure 22 (target position).
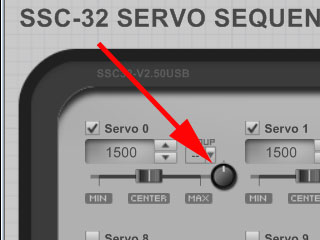 Figure 22b (SSC-32 Utility calibrate).
Figure 22b (SSC-32 Utility calibrate).
To use the RIOS Arm control software, remove the servo horn screw from the elbow servo. Pull the servo horn off, lift the arm two clicks (30°) at the elbow, and reattach the servo horn and screw. Note: the Hitec spline has 24 grooves — each groove is 15°.
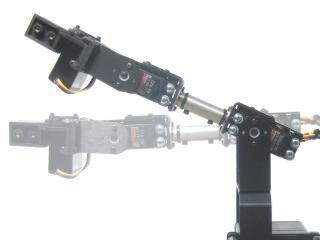 Figure 23.
Figure 23.
Install RIOS following the on-screen prompts. The serial number is on the back of the CD sleeve. Use the RIOS Help File to calibrate and use the arm (Steps 1–7). At Step 8, click "Arm," then "Arm" in the Arm size section, then click the AL5A arm image on the popup screen. Perform an accurate calibration — arm performance is only as good as the calibration. Study the RIOS manual to learn how to store and playback sequences.
 Figure 24 (RIOS).
Figure 24 (RIOS).
To calibrate the arm's shoulder servo, click the "SSC-32" button in RIOS.
 Figure 25 (RIOS).
Figure 25 (RIOS).
Select Shoulder servo #2. Move the slider up (forward) until it looks like Figure 26-2. Set Min Deg to -90° and right-click the slider to set as Min Position.
Move the slider down (backward) until it looks like Figure 26-3. Set Max Deg to 45° and right-click to set as Max Position.
Read the RIOS users guide (accessible from the Help icon or at C:\Program Files\RIOS_SSC-32\Help.pdf) for full usage instructions.
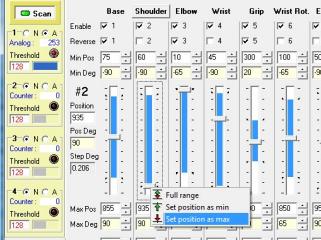 Figure 26-1 (RIOS).
Figure 26-1 (RIOS).
 Figure 26-2 (Shoulder at -90°).
Figure 26-2 (Shoulder at -90°).
 Figure 26-3 (Shoulder at 45°).
Figure 26-3 (Shoulder at 45°).
To connect springs for load-balancing, replace the servo attachment hardware in the locations shown, following the diagrams below. Hook the springs together after they're secured.
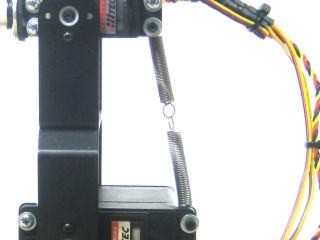 Figure 27.
Figure 27.
The arm assembly is complete. The arm is mechanically robust, but servos can be damaged by improper use — such as commanding an unobtainable position, crashing the arm into itself or other objects. The elbow servo is most vulnerable as it bears the full forearm weight. Load-balancing springs reduce this load.
If you purchased FlowBotics Studio, FlowStone, or FlowArm, proceed with the instruction guides associated with those programs.
Important: People do not like holding heavy objects with their arms outstretched. Servo-based robot arms don't either. The most important rule: Park the arm when not in motion! When moving or at rest it is usually fine. When holding an object, do so for the minimum time required. You can always touch the servo case to check if it is getting hot.