
A6WD2 Rover


Table of Contents
Description
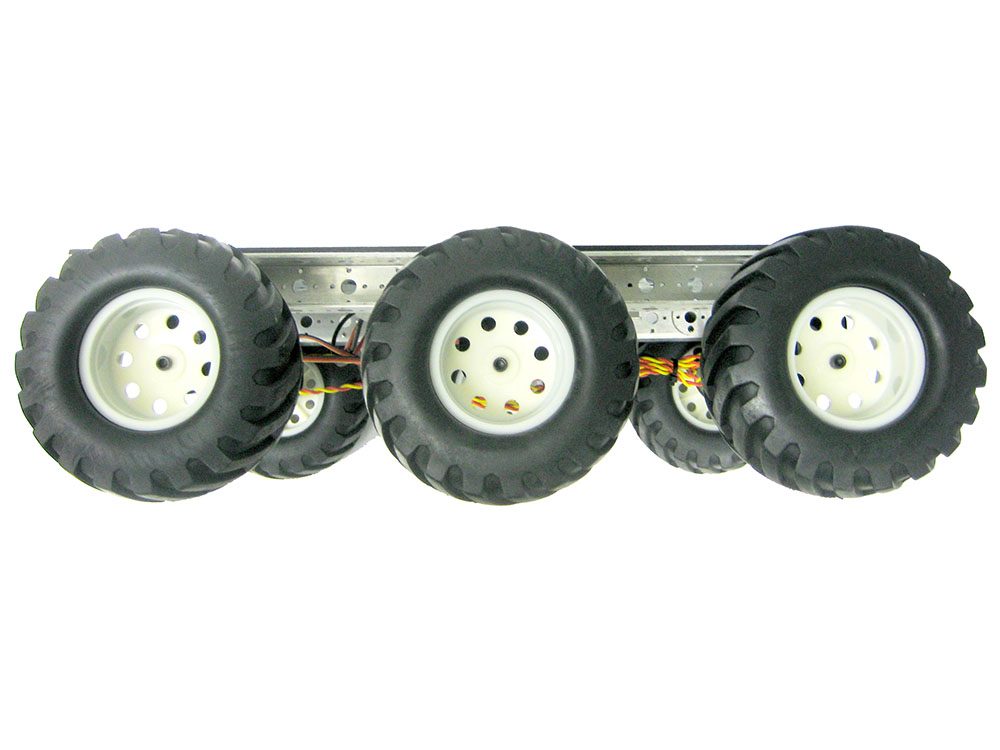
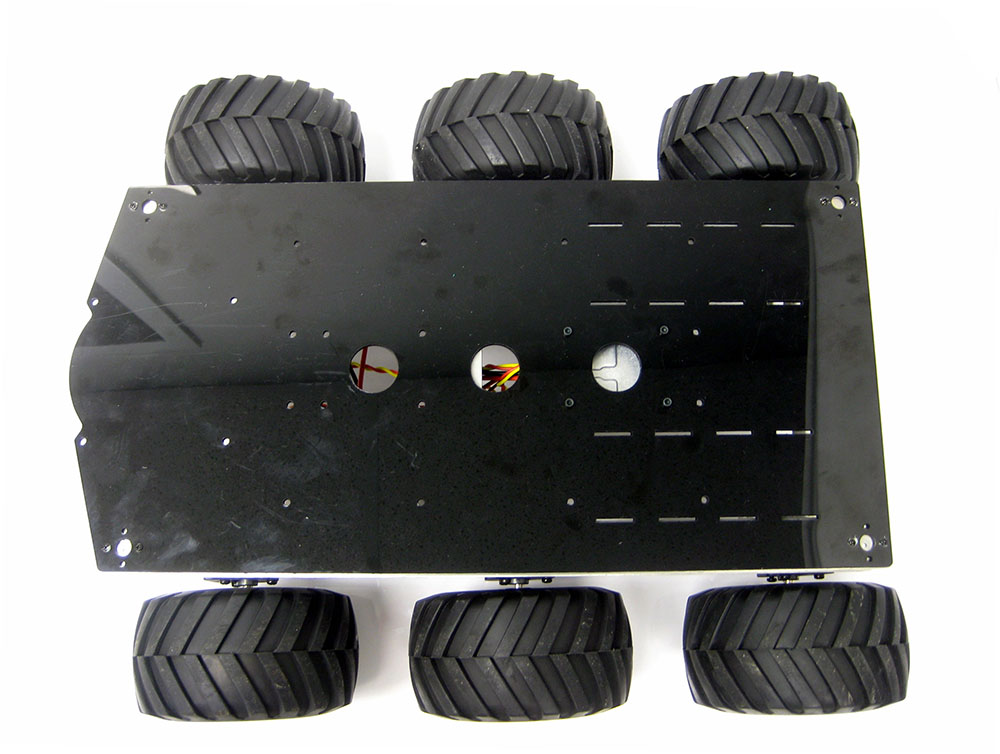
About the A6WD2 v1 Robot The A6WD2 uses the SES C-channels to form a rigid frame, to which a top lexan plate is mounted. There are mounting holes for a BR-KT pan base (or AL5 series robotic arm). The underside of the robot has space for a 6V and a 12V 2800mAh NiMh battery to power the drive motors and servos. There are also mounting holes for an SES board (BotBoarduino, SSC-32, Bot Board etc) and Sabertooth 2x12R/C. The robot is capable of carrying up to a 6lb payload. The most popular accessory for this robot is the AL5D robotic arm, as well as several sensor brackets and IR distance sensors. Note that additional electronic mounting hardaware (hex spacers and screws) are sold separately. The Mechanics Controlling the Robot Powering Options Important! |
|
|
|

Specifications
- Overall Length: 18.00"
- Overall Width: 14.25"
- Tire Height: 4.75"
- Frame Length: 16" (C-channel)
- Frame Width: 8.375" (C-channel to C-channel)
- Overall Height: 4.75" (Not including deck and supports)
- Ground Clearance: 2"
- Weight: 4lbs 6 oz.
- Speed: 36" per second.
User Guide
General
- Polycarbonate Information Page
- Motor Wiring Mini-Guide
- Wheel Encoder Assembly Guide
- Wheel & Tire Mounting
- RC Servo Mid Position Tutorial
- RC Servo Mini-Guide
- RC Digital Servo End Stops (HFP-10)
A6WD2 Information