MES - Reconfigurable Modular Frame
- MES - Arm Assembly
- MES - Center Frame Assembly
- MES - Landing Gear Assembly
- MES - Quick Release Assembly
- MES - Final Assembly
- MES - Arm Clip Positions
The Multirotor Erector Set (MES) - Reconfigurable Frame is an all-in-one frame designed to allow the user to easily experiment with a variety of different frame designs, without having to invest in a variety of custom frames. The frame is based on the M.E.S. system which uses aluminum clamps, G10 plates and carbon fiber tubing. Each of the designs listed below can vary in terms of arm lengths, motor types, landing gear length and more.
Applications
- UAV / drone / multirotor education & experimentation
- Sensor experimentation
- Design & payload optimization
Features
- Mounting for one or two batteries
- Selection of different carbon fiber tube lengths
- Removable landing gear
- Variety of multi-purpose mounting mounts
- Quick release folding arms and removable landing gear
- Side mounted ESC for easy access
- Wiring within tubing
What's Included
- G10 composite parts for frame assembly
- Anodized (orange) aluminum tubing connectors
- Carbon Fiber Tubes
- Hardware (screws, standoffs, grommets, bearings, foam)
What's Needed
- Brushless DC (BLDC) motors (4 to 12 depending on design) and corresponding mounting screws
- Electronic Speed Controllers (ESCs) compatible with BLDC motors selected
- Flight controller (Lynxmotion Quadrino Nano suggested)
- Power Distribution (Lynxmotion Power Distribution Module suggested)
- Battery compatible with BLDC motors (one or two can be mounted)
- Remote Control (RC) system with minimum 4ch and receiver
- Optional: Gimbal; Video transmitter / receiver; Camera; Sensors;
Specifications
- Weight (to be calculated for each configuration)
- Center section (includes all G10 parts, tubing clamps and hardware; no electronics):
- Motor mount (includes G10 parts, tubing clamps and hardware)
- Landing gear connection (includes G10 parts, tubing clamps and hardware)
- Carbon fiber tubing: 300mm =
- Battery mount (includes G10 parts, tubing clamps and hardware):
- Size:
- Center section:
- Motor mount:
- Landing gear connection:
- Carbon fiber tubing: 16mm OD, 300mm long
- Compatibility
- BLDC motor sizes:
- Propeller sizes:
- Flight controller:
- Gimbal:
- Sensors:
- Mechanics
- Tubing sections are compatible with Lynxmotion M.E.S. tubing clamps
- Carbon fiber tubes are standard 16mm (OD)
- Lynxmotion S.E.S. pattern
Design Examples
The following designs are examples of what is possible with the MES system. These are all included in the assembly guide and allow you to become familiar with the system. Spare parts are included to allow you to create alternative designs, and additional hardware can be purchased separately.
| CAD Image | Title / Description |
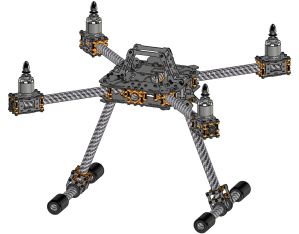
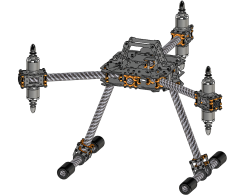
| X4 Quadcopter The X4 quadcopter design incorporates folding arms and removable landing gear. There is a motor mounted to each of the four arms. Wiring is internal. |
| X8 Quadcopter The X4 quadcopter design incorporates folding arms and removable landing gear. There is a motor mounted to both the top and the bottom of each of the four arms. Wiring is internal. |
| Y4 Tri Arms The Y4 design design incorporates folding arms and removable landing gear. There is one mounted to the front arms and two motors mounted to the center rear arm. |
| Y6 Tri Arms The Y6 design includes two folding arms, each with a motor, and a rear fixed arm with a motor mounted to the top and bottom of the arm. Wiring is internal. |
| HEX 6 Hexacopter The H6 hexacopter design incorporates folding arms and removable landing gear. There is a motor mounted to each of the six arms,. Wiring is internal. |
| HEX 12 Hexacopter The H12 hexacopter design incorporates folding arms and removable landing gear. There is a motor mounted to both the top and bottom of each of the six arms. Wiring is internal. This design requires independent control of 12 motors, which is not supported by MultiWii / |