
06 - Setup
Version 9.1 by Eric Nantel on 2021/12/20 13:41
Microcontroller / Autonomuous
| 1. Set the Sabertooth DIP Switches for your needs | |||
| Sabertooth 2 x 12A Standard | Typical Setup | ||
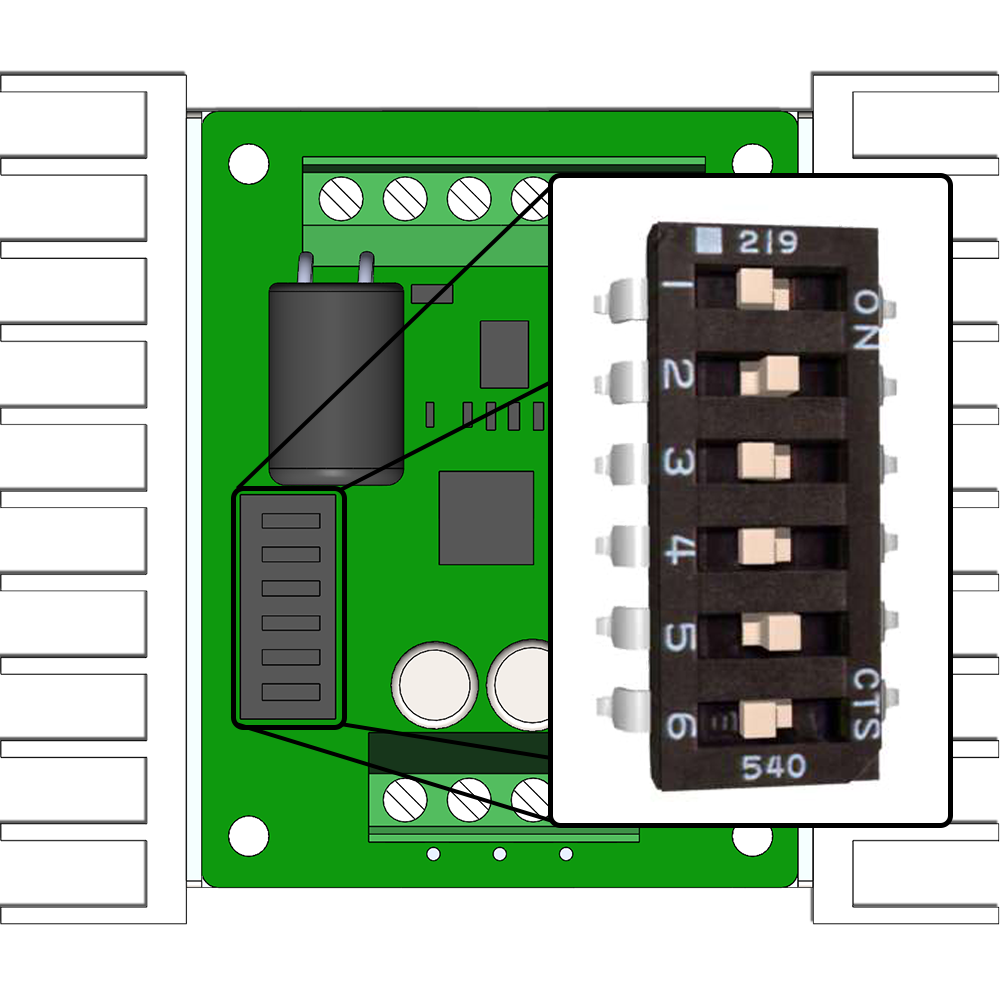 | 1 | OFF (Enable RC Mode) | |
| 2 | ON (Enable RC Mode) | ||
| 3 | OFF (Lithium Battery Mode) | ||
| 4 | OFF ( Enable Independent Mode) | ||
| 5 | ON (Disable Exponential) | ||
| 6 | OFF (Disable Timeout) | ||
| Sabertooth 2x12 - Dip Switch Wizard | |||
| Sabertooth 2x12 - User Guide | |||
| 2. Connect the Sabertooth to your Microcontroller | |||
| Jumper on "VS" to use the Sabertooth as the power source for the BotBoarduino | ||
 | No Jumper to isolate the middle row and avoid conflicts | ||
 | Ground or 0V | ||
 | D3 To "S1" on Sabertooth #1 | ||
 | D5 To "S2" on Sabertooth #1 | ||
 | D6 To "S1" on Sabertooth #2 | ||
 | D9 To "S2" on Sabertooth #2 | ||
 | Jumper on "Ext" to power the BotBoarduino from the Sabertooth 5V regulator | ||
 | Jumper on "VL = VS" to link the two together | ||
| 3. Load the microcontroller with Code | |||
| Lynxmotion GitHub - Arduino A4WD3 Examples | |||
| 4. Connect the battery | |||
| 5. Enjoy | |||
