
Phoenix 3DoF Hexapod


Table of Contents
Description
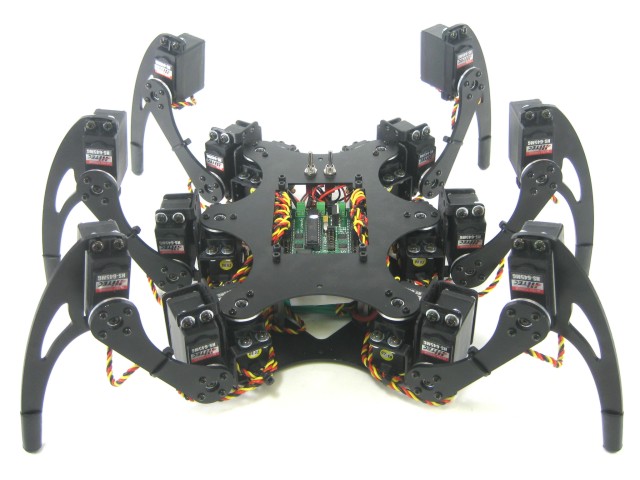
About the Phoenix Hexapod Walking Robot The Mechanics Controlling the Robot The combo kit comes with the BotBoarduino. By offloading the servo pulse generation and sequence movement timing to the SSC-32 the BotBoarduino has plenty of power to do some really cool things. The Phoenix program allows the robot to walk with variable speed, in any direction (translation), or turn in place (rotation), or any combination of the two. The leg lift and ride height is adjustable as well as the gait walking speed. You can rotate the body in every axis. There are preset walking modes and gaits to choose from. All of these are accessible from the controller. We recommend the wireless PS2 controller (RC-01) to get the robot up and running quickly. The Phoenix code also supports a serial control mode for controlling the robot via a serial connection. The Phoenix code was written by Jeroen Janssen (Xan on the forum). Thanks, Jeroen! The programming is already done for this robot. You no longer have to be a computer scientist to play with this level of robotics. The control options are: PS2 remote control, Xbee / DIY RC stick radio control, and TTL serial control. Powering Options Important! |
|
|
| ||
|
|
|
|
|







Specifications
- Servo motion control = local closed loop
- Steering = omnidirectional
- Number of legs = 6
- Degrees of freedom per leg = 3
- Motion speed = 10"/S
- Height (body) = 2.00"
- Height (overall, as in product view) = up to 5.25"
- Width (body) = 5.88"
- Width (overall, as in product view) = 17.00"
- Length (body) = 7.50"
- Length (overall, as in product view) = 14.50"
- Weight (w/out batteries) = 3lb 10oz.
- Ground clearance = up to 5.50"
User Guide
General
- Polycarbonate Information Page
- RC Servo Mid Position Tutorial
- RC Servo Mini-Guide
- RC Digital Servo End Stops (HFP-10)
Phoenix Information
- Phoenix 3DoF Assembly Instructions v5.0
- The Complete H3/H3-R Tutorial (BotBoarduino) v2.0
- Phoenix Bot Board II / BASIC Atom Pro Tutorial
- Phoenix Excel for SEQ-01
Additional Information