
Gripper Assembly Instructions
Gripper Assembly Instructions
Updated March 1, 2010
Safety first! Wear eye protection and never touch a powered robot!
Do not use Loctite or thread locks. They are not necessary and may damage the PVC. PVC parts have a definite good and bad side — keep the good sides facing outward.
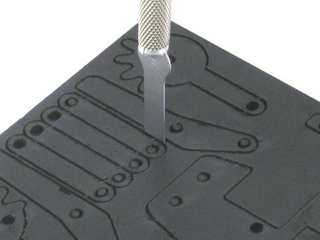
The PVC panels are laser cut and need to be cleaned before use. Using a damp paper towel, clean top and bottom while still attached to the panel, then cut each part from the panel and clean the edges.

Complete gripper.
The PVC parts need to be carefully cut out of the panel. A thin, flat blade exacto knife will be very helpful. Simply cut through the tabs to remove the parts.
 Parts in the kit.
Parts in the kit.
DO NOT overtighten screws on the PVC parts! The PVC will compress and will become weaker as a result!
 Example image.
Example image.
Connect the round part and the gripper baseplate together using superglue.
 Figure 1.
Figure 1.
Attach this assembly directly to the wrist rotate servo horn using two #4 x 3/8" tapping screws. If you are not using a wrist rotate assembly, connect directly to the "C" bracket using two 2-56 x .375" machine screws and nuts.
 Figure 2.
Figure 2.
If you are using a heavy duty wrist rotate, use two 2-56 x .5" screws instead. Note: washers as spacers are not needed when attaching the new gripper.
 Figure 3.
Figure 3.
Using two 4-40 x 1" hex head screws, construct the two fingers for the gripper as shown. Secure with a nylon insert lock nut. DO NOT overtighten — the PVC WILL be damaged.
 Figure 4.
Figure 4.
Attach the gripper fingers to the gripper base using two 4-40 x 1" hex head screws and nylon insert lock nuts.
 Figure 5.
Figure 5.
Attach the HS-225 servo to the gripper base with two 4-40 x .5" screws and .250" nuts.
 Figure 6.
Figure 6.
Attach a 4-40 x 1" screw to the gripper base as shown with a nylon insert lock nut.
 Figure 7.
Figure 7.
Slide the passive crossmember spacer over the screw and lock nut.
 Figure 8.
Figure 8.
Attach the smaller, passive gear part to the assembly as shown. Use a nylon insert lock nut.
 Figure 9.
Figure 9.
Attach the passive gear to the finger assembly using a 4-40 x 1" screw and lock nut as shown.
 Figure 10.
Figure 10.
Make sure each finger moves freely. They should be tight enough that they do not move out of line, but loose enough to move without resistance.
 Figure 11.
Figure 11.
Insert the 4-40 x 1" hex head screw through the hole in the larger, driven gear piece as shown. Secure with a nylon insert lock nut.
 Figure 12.
Figure 12.
Attach this assembly to the gripper finger using a nylon insert lock nut, and to the servo horn using two #4 x 3/8" tapping screws.
.GIF)
.GIF) Figure 13.
Figure 13.
Clean the inside of each finger using rubbing alcohol and a paper towel or rag. Apply the foam rubber strips to the inside of the gripper after the surface has dried.
 Figure 14.
Figure 14.
The operating principle is simple: command the servo to close the fingers until enough pressure is applied to hold an object. The servo is lightweight but very strong with a metal geartrain.
Care must be taken to prevent the servo from closing too tightly. Use just enough pressure — no more than needed. If full force is attempted, the servo will heat up and self destruct in a short time.
 Figure 15.
Figure 15.