
Wheel Encoder Assembly Guide v1.0
Last modified by Eric Nantel on 2023/02/08 13:49
| Wheel
Encoder Assembly Guide. Updated 02/16/2011
Hardware: Goal: |
 Image of encoder on motor. |
|
|
|
| Step
1. If you going to solder to the motor tabs, it's a good idea to bend them out of the way before installing the encoder. If you're going to use push on connectors this step isn't necessary. Be sure to orient the motor as shown EXACTLY as the raised plastic (name, logo and plus sign) will prevent the adhesive from making good contact if the encoder is not applied with the proper orientation. |
 Figure 1. |
| Step
2. Before removing the adhesive backing material, fit the sensor to the motor as shown. It has to be oriented EXACTLY as shown for proper fit. When you are happy with the placement, remove the backing and carefully press it in place. I have not needed the expensive alignment tool from US Digital to do this, but you have to be careful not to press it firmly until it is exactly centered. If you are good with your hands this will be easy. If you have ten thumbs, you might want to ask for help. |
 Figure 2. |
| Step
3. Simply press the encoder disk onto the motor shaft. Press it down firmly and this step is complete. |
 Figure 3. |
| Step
4. Snap on the top plastic part. |
 Figure 4. |
| Step
5. Insert the cable as shown. |
|
| Step
6. Red = +5vdc Black = Ground Green = Output A Yellow = Output B |
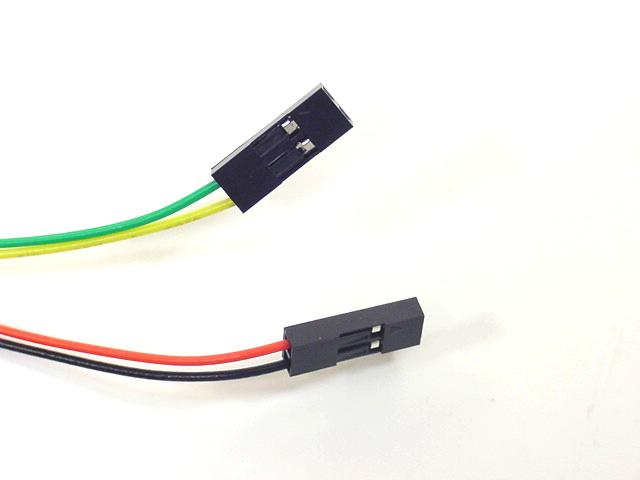 Figure 6. |