
LSS-PRO Specifications
Last modified by Eric Nantel on 2024/12/23 07:13
| Specification | LSS-P-L1 | LSS-P-S1 | LSS-P-M1 | Notes | |
| Power | |||||
| Absolute Minimum Voltage | 18V | 18V | 18V | The electronics can operate at this voltage, but the torque will be very low. | |
| Recommended Minimum Voltage | 30V | 30V | 30V | ||
| Recommended Operating Voltage | 36V | 36V | 36V | An 8S (29.6V nominal) LiPo is ideal for mobile applications | |
| Absolute Maximum Voltage | 40V | 40V | 40V | A 9S LiPo can be used (37.8V fully charged) | |
| Power Connector | XT60 x2 | XT60 x 2 | XT60 x2 | Connect only ONE power supply. Second XT60 for daisy chaining. | |
| Torque | |||||
| Max Static Torque (36V) | ~9Nm | ~32Nm | N/A | Servo can support this (holding), but cannot move. See dynamic torque below. | |
| Max Dynamic Torque (36V) | 18Nm @ 2.5RPM | 80Nm @ 1.75RPM | 220Nm @ 1RPM | ||
| Min Dynamic Torque (36V) | 10Nm @ 12.5RPM | 26Nm @ 15RPM | 55Nm @ 10.8RPM | Note that for the M1, there is a drop in torque between 3.5rpm to 6rpm. | |
| RPM | |||||
| RPM for Highest Torque (36V) | 2.5 RPM (15°/s) | 1.75 RPM (10.5°/s) | 1.0 RPM (6°/s) | Refer to performance graph to estimate maximum RPM based on torque. | |
| Maximum RPM (36V) | 12.5rpm (75.00°/s) | 15rpm (90.00°/s) | 10.8rpm (65.00°/s) | Hard coded and cannot be exceeded | |
| Accuracy | |||||
| Maximum no Load Accuracy (36V) | 0.01° | 0.01° | 0.01° | 1/2 Step size of 0.9° / 100 gear ratio | |
| Environment | |||||
| Maximum PCB Temperature | 60C | 60C | 60C | ||
| Maximum MCU Temperature | 100C | 100C | 100C | ||
| Maximum Motor Temperature | 100C | 100C | 100C | Based on external probe affixed to side of stepper motor | |
| Environmental Temperature Range | 10°C - 30°C | 10°C - 30°C | 10°C - 30°C | Intended to be operated at normal room temperatures | |
| IP Rating | IP20 | IP20 | IP20 | Indoor use only. Protection against solid objects larger than 12.5 mm (e.g., fingers), but no protection against liquids, poweders or dust. | |
| Resolution | |||||
| Position | ±0.01° | ±0.01° | ±0.01° | ||
| Speed | ±0.01°/s | ±0.01°/s | ±0.01°/s | ||
| Temperature | 1C | 1C | 1C | ||
| Communication | |||||
| USB Communication Type | TTL Full Duplex Async Serial (5V) | TTL Full Duplex Async Serial | |||
| Suggested Baudrate | 115200 | LSS Pro Config software automatically scans all baud rates from 9600+ | |||
| Serial Protocol | LSS PRO Protocol | Custom communication protocol. | |||
| CAN Connector Type (both sides) | RJ45 x2 | DO NOT plug into other RJ45 devices like routers, Ethernet ports etc. | |||
| CAN Pinout (custom) | See LSS-PRO Electrical page | NOT compatible with other RJ45 devices / standards | |||
| Angle | |||||
| Operating Angle | Up to 360° & Multi-turn | Up to 360° & Multi-turn | Up to 360° & Multi-turn | Multi-turn uses virtual positioning | |
| Sensors | |||||
| Magnetic Encoder | 16 Bit Absolute | ||||
| IMU | 3 axis gyroscope 3 axis accelerometer | ±4g and ±500dps for linear / gyro acceleration | |||
| Motor Temperature | External temperature probe (PT100) | ||||
| General | |||||
| Weight | 1.1 Kg | 1.52 Kg | 4.5 Kg | Does not include horns or mounting hardware | |
| Size / Dimensions | See: LSS-PRO Mechanical | ||||
| Gear Ratio | 1 : 100 | ||||
| Gear Backlash | 0.0028° | ||||
| Case Material | Machined aluminum | ||||
| Gear Material | Steel | ||||
| Output Connection | See: LSS-PRO Mechanical | ||||
| Motor Type | NEMA 17 | NEMA 23 | NEMA 34 | ||
| Performance | |||||
| Performance Graph |
|
|
| Click to zoon | |
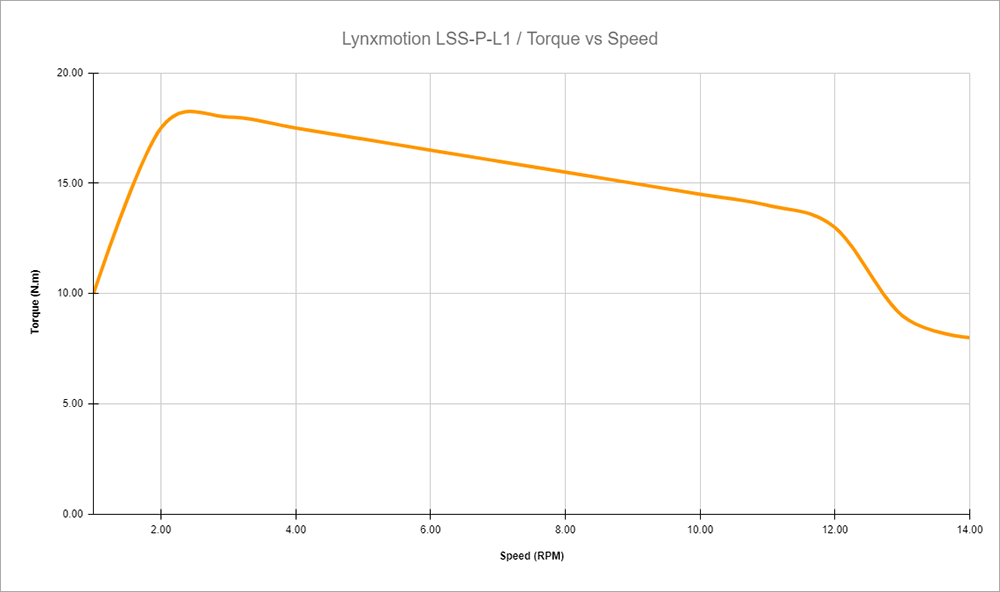
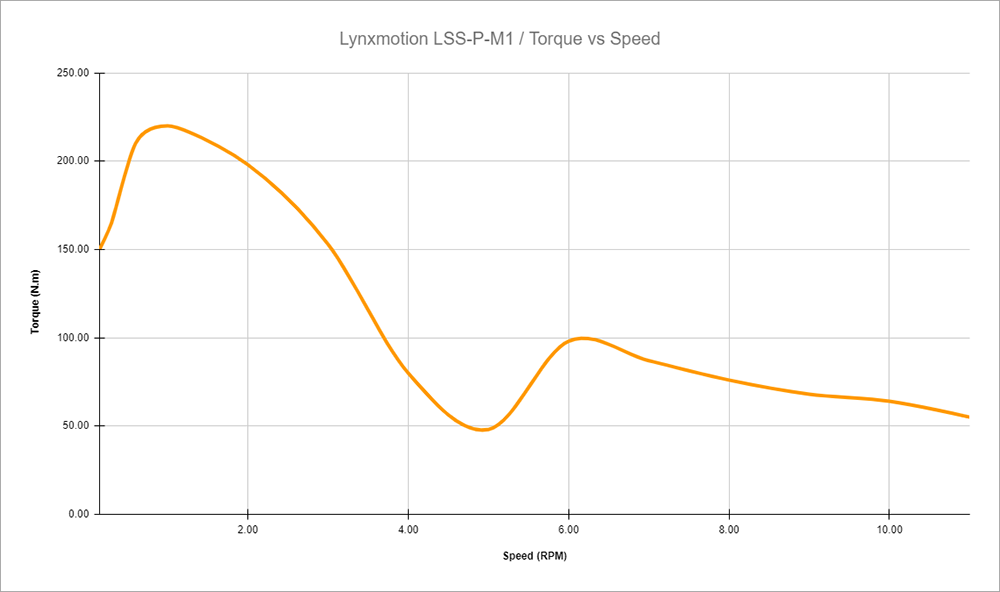
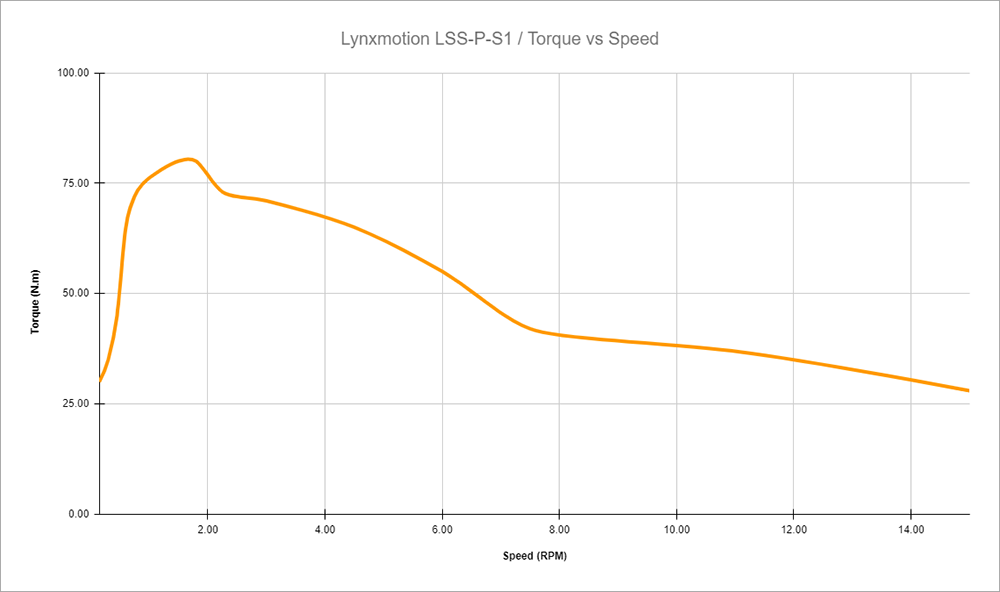
Values provided are based on test results. Actual values may vary slightly.