
SES-PRO Robotic Arm UI
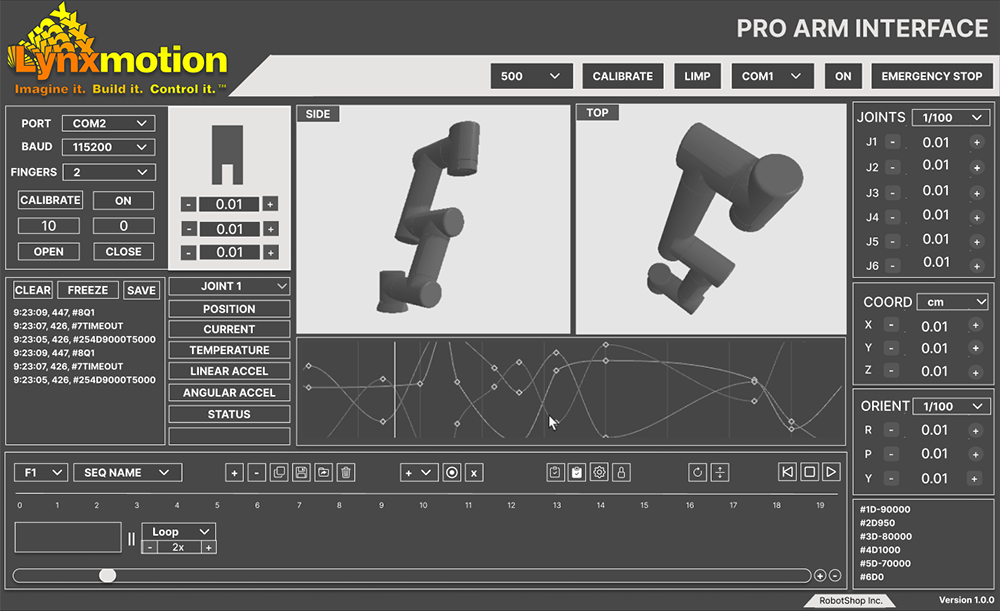

Table of Contents
Description
Features
<direct commands>
- Does not require ‘#’ and ‘\r’ chars, example for #254Q\r the user should enter 254Q.
- The replies of the query commands are shown in the text field below.
- The commands are validated, and it shows a notification in case of error.
- Supported commands:
Action:
# Communication setup
RESET = "RESET"
DEFAULT_CONFIGURATION = "DEFAULT"
FIRMWARE_UPDATE_MODE = "UPDATE"
CONFIRM_CHANGES = "CONFIRM"
# Motion
POSITION = "D"
MOVE_DEGREES = "MD"
WHEEL_MODE_DEGREES = "WD"
WHEEL_MODE_RPM = "WR"
HALT_AND_HOLD = "H"
LIMP = "L"
# Motion setup
ORIGIN_OFFSET = "O"
ANGULAR_RANGE = "AR"
ANGULAR_ACCELERATION = "AA"
ANGULAR_DECELERATION = "AD"
GYRE_DIRECTION = "G"
MAX_SPEED_DEGREES = "SD"
MAX_SPEED_RPM = "SR"
# RGB LED
LED_COLOR = "LED"
Query:
# Communication setup
ID_NUMBER = "QID"
ENABLE_CAN_TERMINAL = "QET"
USB_CONNECTION_STATUS = "QUC"
# Motion
POSITION = "QD"
WHEEL_MODE_DEGREES = "QWD"
WHEEL_MODE_RPM = "QWR"
MOTION_STATUS = "Q"
MOTION_TIME = "QMT"
CURRENT_SPEED = "QCS"
# Telemetry
MODEL_STRING = "QMS"
FIRMWARE_VERSION = "QF"
SERIAL_NUMBER = "QN"
TEMP_CONTROLLER_ERROR = "QTCE"
TEMP_CONTROLLER_WARNING = "QTCW"
CURRENT = "QC"
ACCX = "QIX"
ACCY = "QIY"
ACCZ = "QIZ"
ACCALPHA = "QIA"
ACCBETA = "QIB"
ACCGAMMA = "QIG"
TEMPMCU = "QTM"
TEMPPROBE = "QTP"
TEMPPCB = "QT"
ERROR_FLAGS = "QEF"
# RGB LED
LED_COLOR = "QLED"
LED_BLINKING = "QLB"
LED_INDICATOR = "QLI"
# Motion setup
ORIGIN_OFFSET = "QO"
ANGULAR_RANGE = "QAR"
ANGULAR_ACCELERATION = "QAA"
ANGULAR_DECELERATION = "QAD"
GYRE_DIRECTION = "QG"
MAX_SPEED_DEGREES = "QSD"
MAX_SPEED_RPM = "QSR"
Conf:
# Communication setup
ID_NUMBER = "CID"
ENABLE_CAN_TERMINAL = "CET"
USB_CONNECTION_STATUS = "CUC"
# Motion setup
MAX_SPEED_DEGREES = "CSD"
MAX_SPEED_RPM = "CSR"
ORIGIN_OFFSET = "CO"
ANGULAR_RANGE = "CAR"
ANGULAR_ACCELERATION = "CAA"
ANGULAR_DECELERATION = "CAD"
GYRE_DIRECTION = "CG"
# RGB LED
LED_COLOR = "CLED"
LED_BLINKING = "CLB"
Modifier:
SPEED = "SD"
- TIME = "T"