
SES-PRO Robotic Arm UI
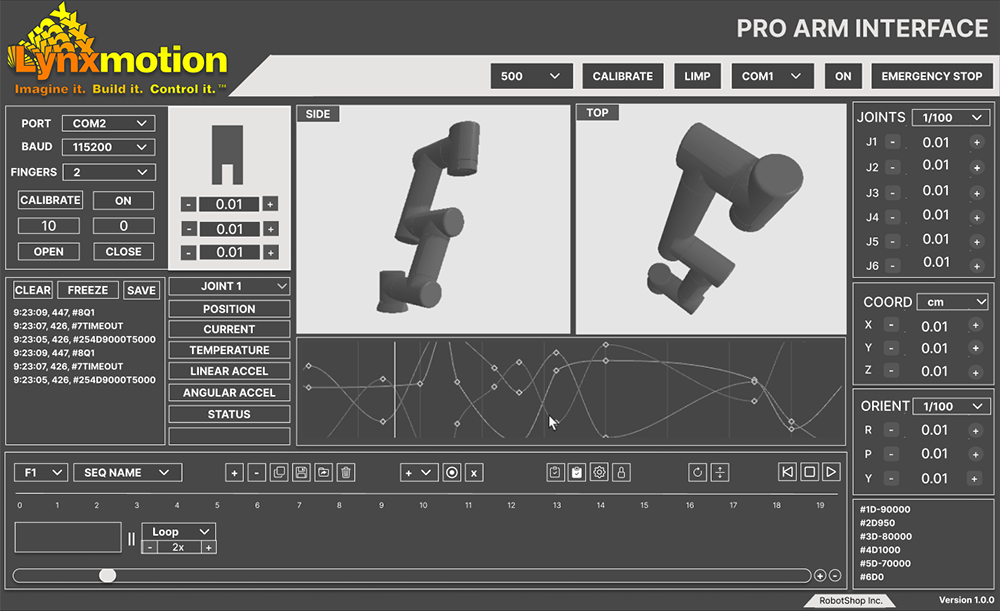

Table of Contents
Description
Features
User Guide
Emergencies
When an emergency occur the user will have three choices:
HALT & HOLD
Will stop all motions on every joints and hold them in their last positions.
LIMP
All joints will go limp which mean there will be nothing avoiding them to turn freely. The internal mechanism of the LSS-P actuators does have some back driving forces but it will make the arm fall if this is engaged.
POWER SUPPLY EMERGENCY
A push to cut power button is located on the power supply which will indeed cut all actuator from receiving their power. This will also make the arm fall.
3D Model
Control the View
Arm connection
Model
Serial COM Port
Connect
Gripper connection
Model
Serial COM Port
Baudrate
Connect
Calibrate
Speed
Force
Open / Close
Manual Moves
Joints Control
Coordinates Control
Direct Command
This section allow the user to send commands using the LSS-PRO Communication Protocol directly if required.
A few things to keep in mind when using this:
- Make sure you know what you are doing as you can make the arm move in dangerous ways.
- Sending commands does not require ‘#’ and ‘\r’ chars.
- example for #2\r you should enter 2Q and press the "SEND" button
- The commands are validated, and it shows a notification in case of error.
- The replies of queries are shown in the text field below.
Telemetry
Data to Display
Display / Hide Actuator