
LSS FlowArm - Setup
Version 29.1 by Eric Nantel on 2022/06/20 15:20
| Connecting via USB | ||||
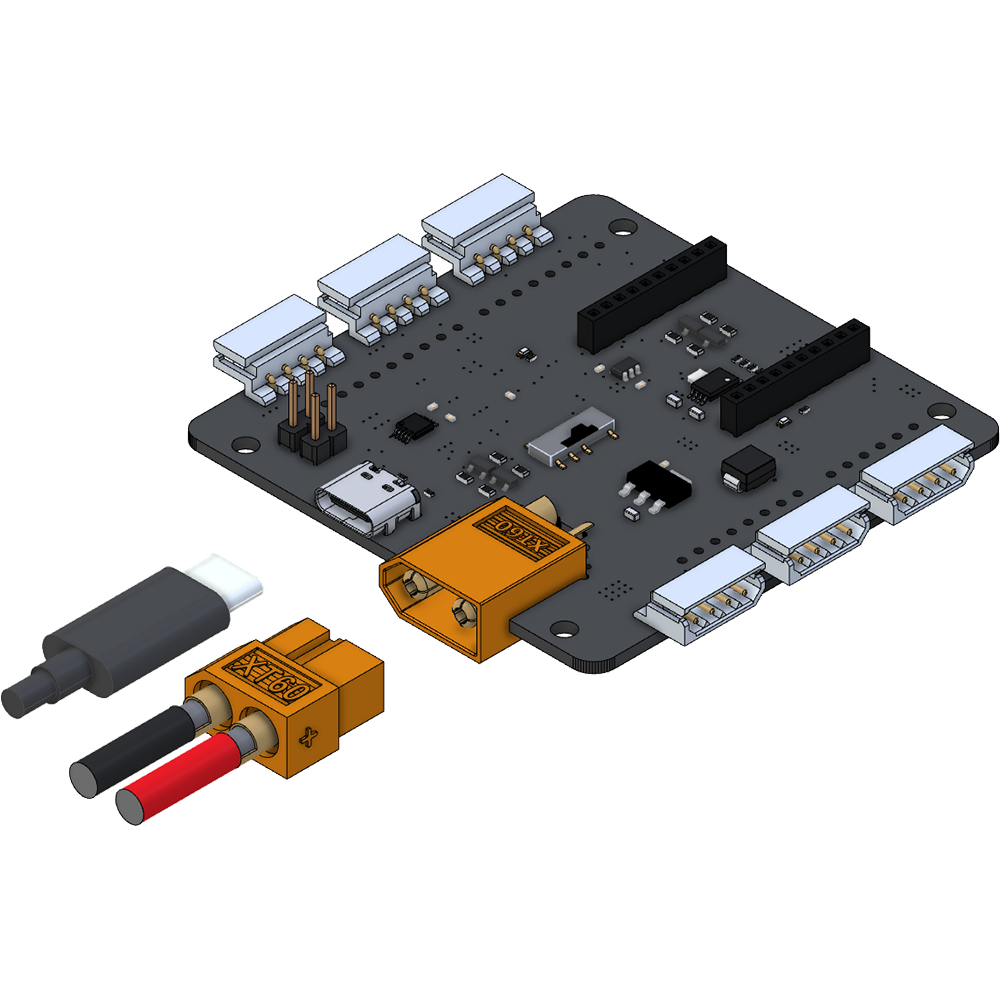
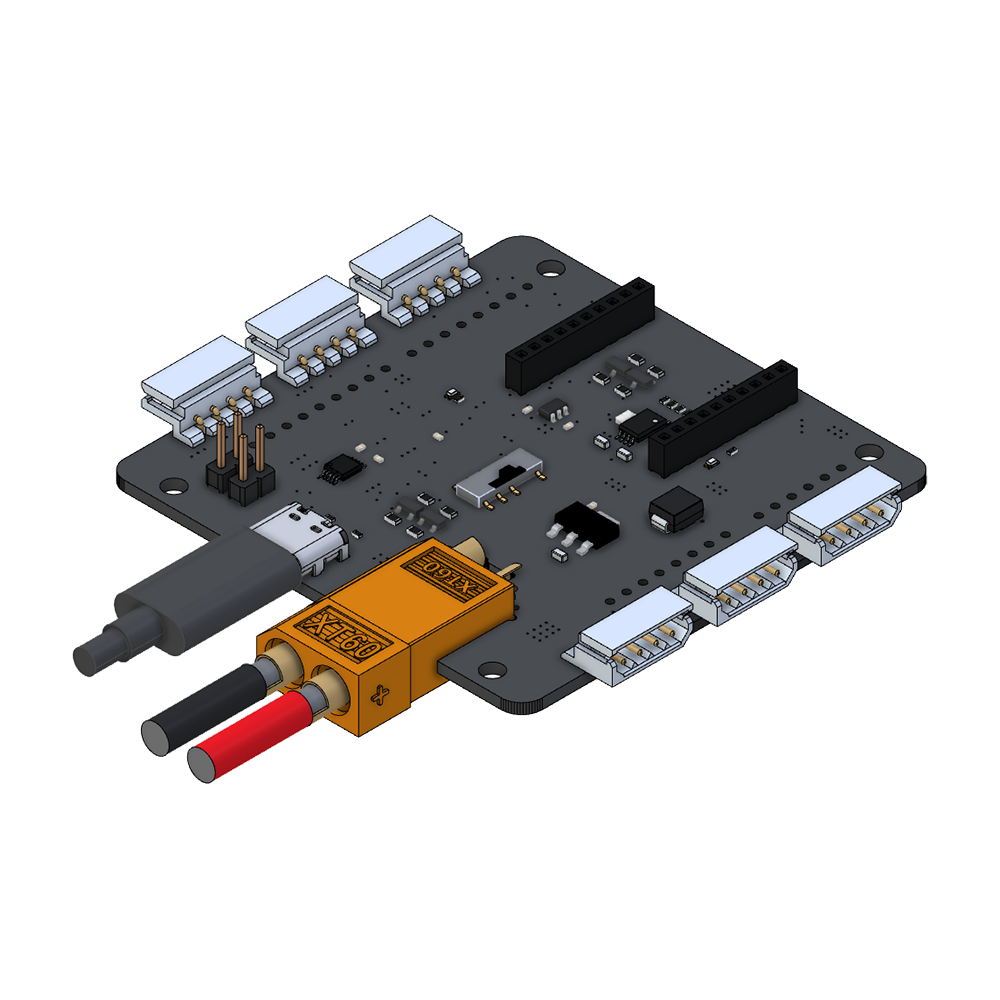
| 1. Connect the USB cable to the Arm and PC & Power Adapter to the Arm XT60 | ||||
|
| |||
| 2. Power the arm using the power supply ON/OFF switch. | ||||
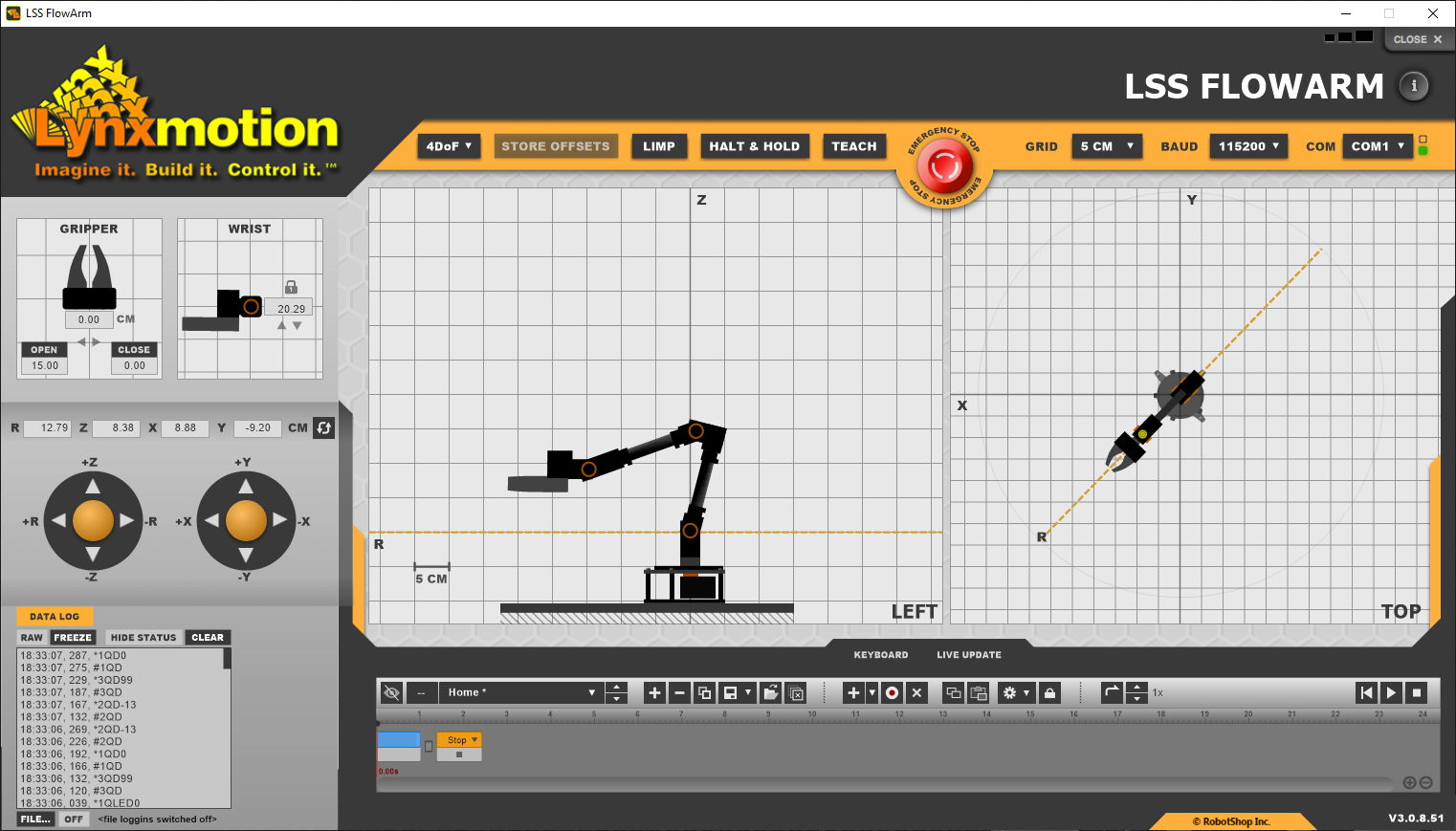
| 3. Start the LSS FlowArm software (available HERE) | ||||
| ||||
4. Select the type of LSS Arm you are using (3 DoF / 4 DoF / 5 DoF) It will automatically try to find the connected Arm but, if not, you can manually choose the appropriate COM port from the drop-down list & the baud rate (default is 115200) | ||||
| ||||
| The software sends a query to servo ID1 and once a reply is received, it determines connection has been established and a green light will be displayed aside the COM port. | ||||
Connecting via USB
- Connect the USB cable to the LSS Adapter board on your robot
- Plug the USB connector into the PC
- Connect your LSS to the LSS-Adapter with the Lynxmotion cable
- Connect the power to the LSS Adapter via the yellow XT60 plug
- Power on the robot (On/Off switch)
- Start the LSS FlowArm software
- Select the type of LSS Arm you are using (3 DoF / 4 DoF / 5 DoF)
- It will automatically try to find the connected Arm but, if not, you can manually choose the appropriate COM port from the drop-down list & the baud rate (default is 115200)
- The software sends a query to servo ID1 and once a reply is received, it determines connection has been established and a green light will be displayed aside the COM port.
Calibration
- Go in "TEACH" mode with the button on the top bar.
- Manually place the arm in the correct position for your model and with the gripper closed. (see images bellow)
- Store the values or Offsets by clicking "STORE OFFSETS"
- At that point the arm should "stay" in that position once released
- Exit the "TEACH" mode by clicking it again
Calibration Positions
| 4 DoF | 3 DoF | ||
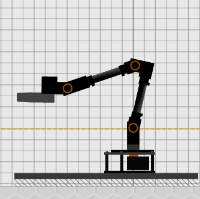 | 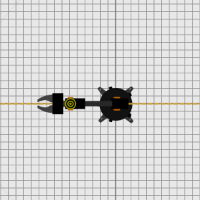 | 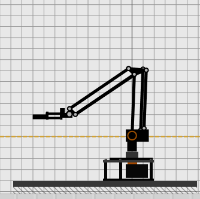 | 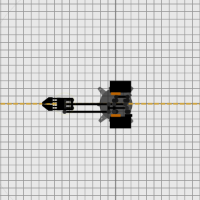 |