LSS FlowArm - Setup
Version 47.1 by Eric Nantel on 2022/06/20 15:56
Page Contents
| Connecting via USB | ||||
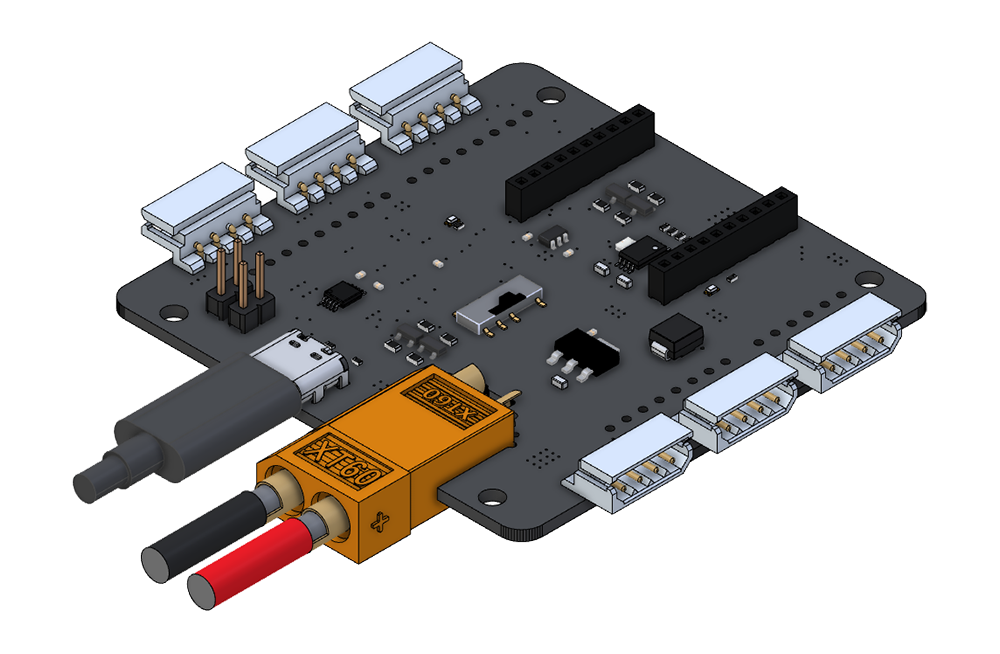
| 1. Connect the USB cable to the Arm and PC & Power Adapter to the Arm XT60 | ||||
|
| |||
| 2. Power the arm using the power supply ON/OFF switch. | ||||
| 3. Start the LSS FlowArm software (available HERE) | ||||
| ||||
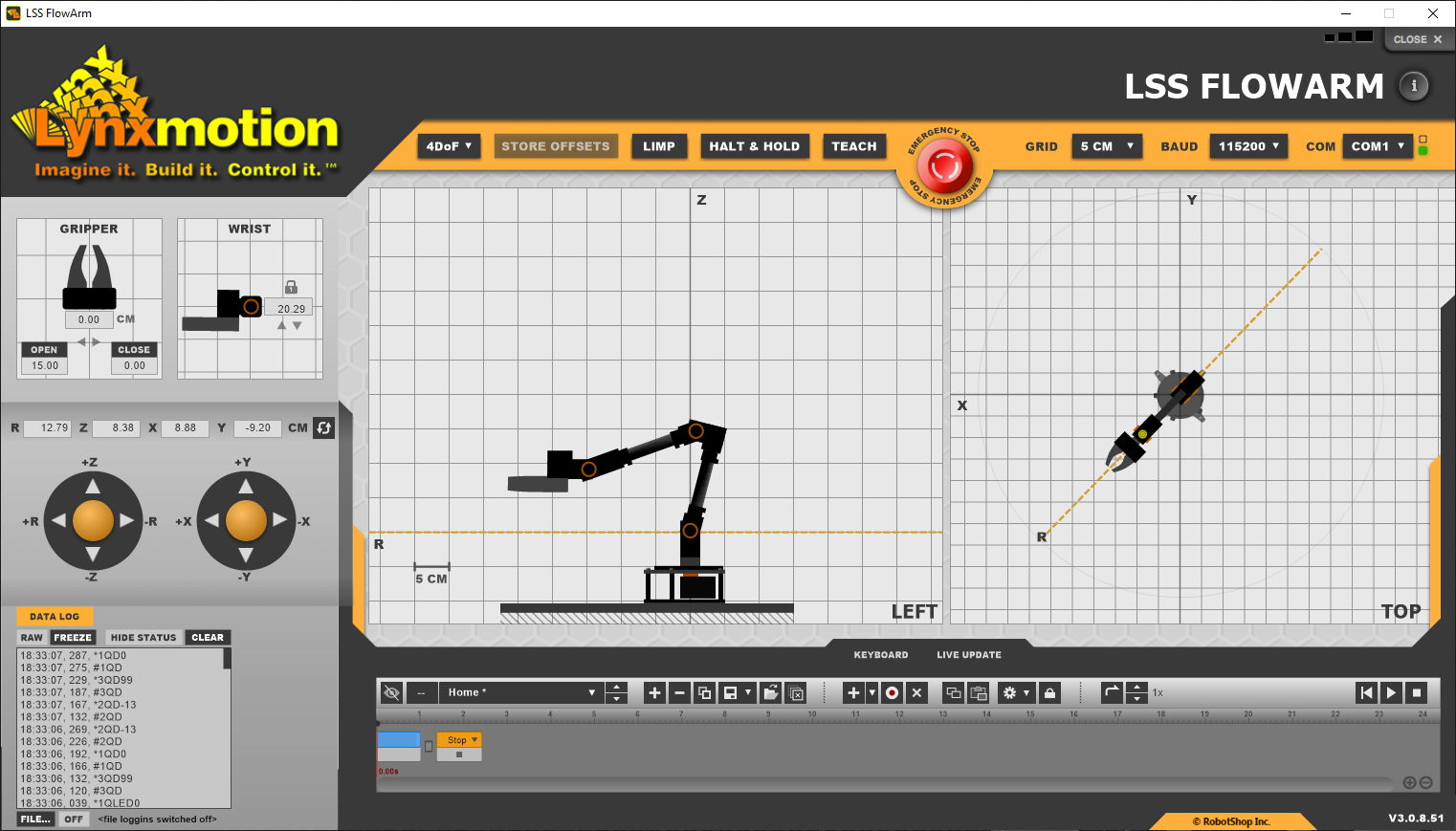
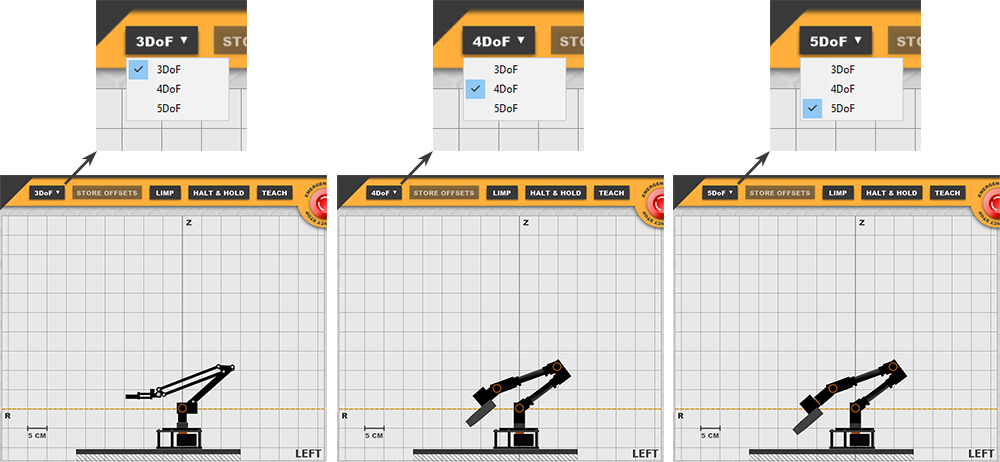
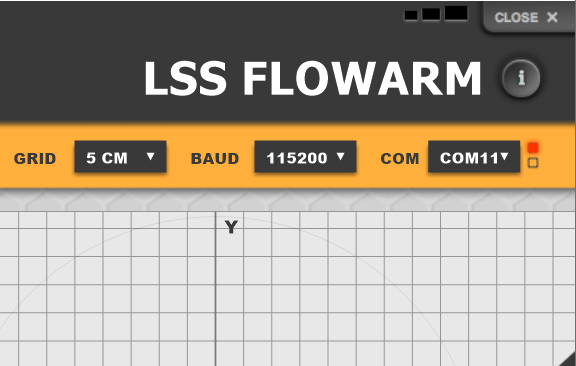
4. Select the type of LSS Arm you are using (3 DoF / 4 DoF / 5 DoF) It will automatically try to find the connected Arm but, if not, you can manually choose the appropriate COM port from the drop-down list & the baud rate (default is 115200) | ||||
| ||||
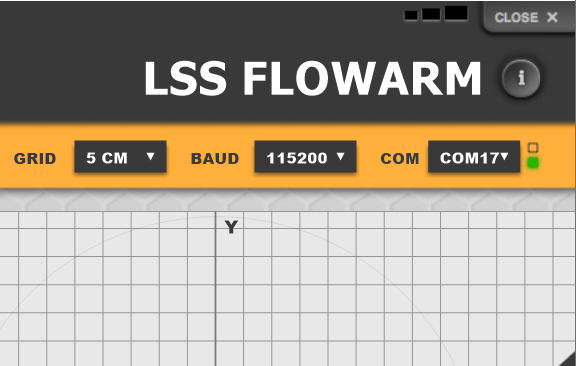
| 5. The software sends a query to servo ID1 and once a reply is received, it determines connection has been established and a green light will be displayed aside the COM port. | ||||
|
| |||

| Calibration (Store Offsets) | ||||
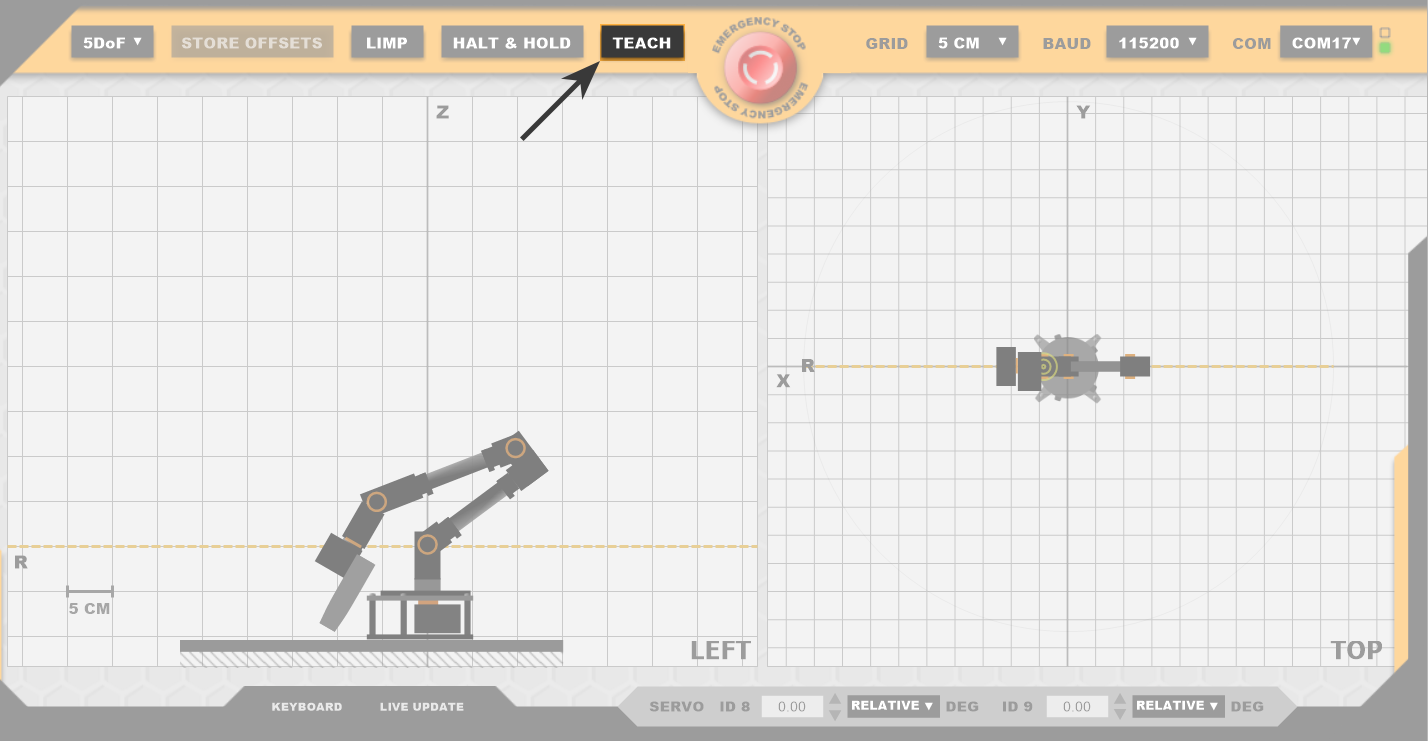
1. Go in "TEACH" mode with the button on the top bar. | ||||
| ||||
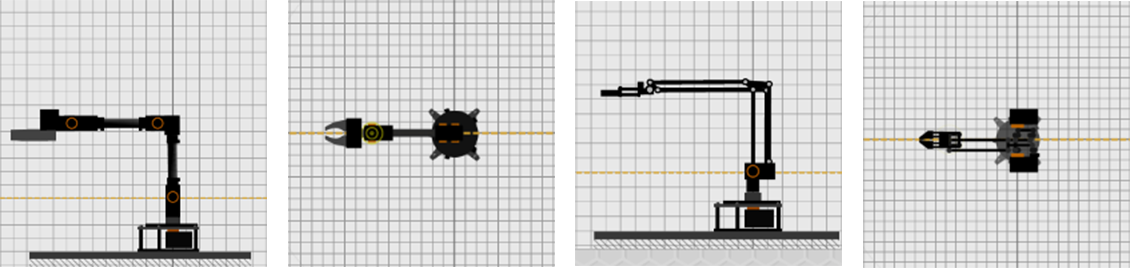
2. Manually place the physical arm in the correct position for your model and with the gripper closed and keep it in this position until the next step is done. (see images bellow) | ||||
| 4DOF / 5DOF | 3DOF | |||
| ||||
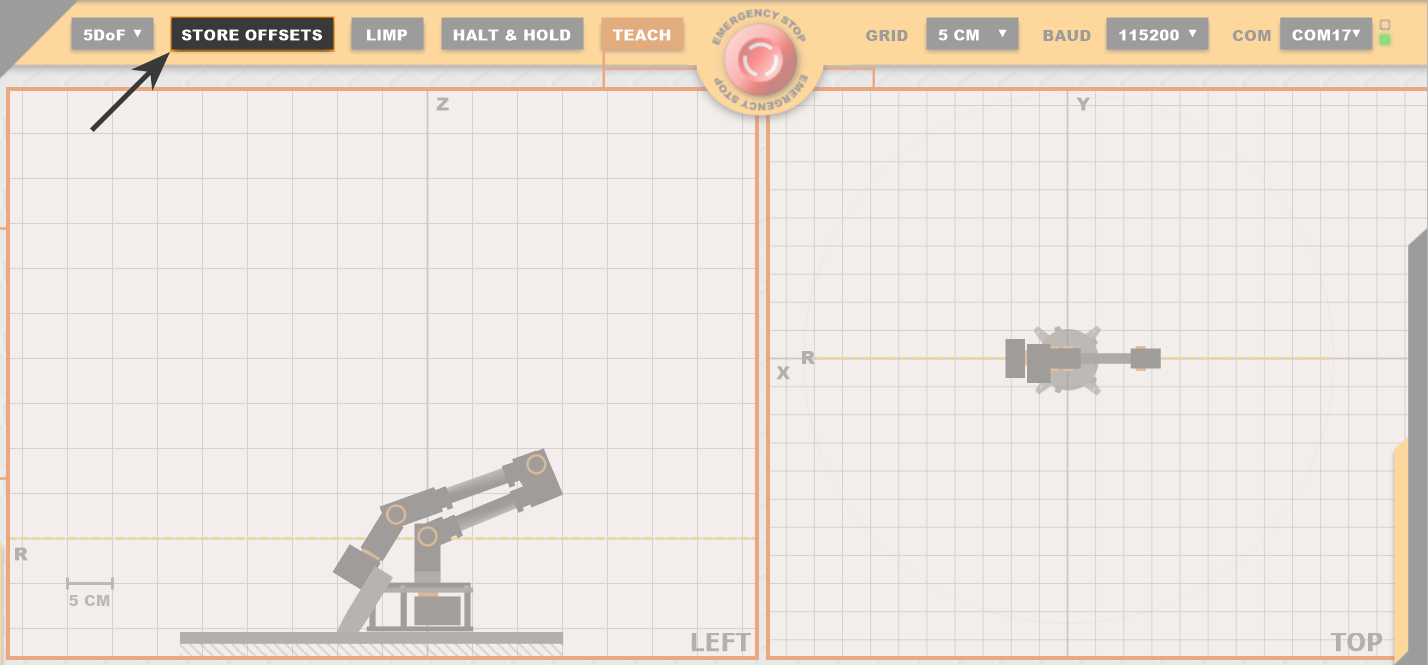
| 3. Store the values or Offsets by clicking "STORE OFFSETS" | ||||
| ||||
| 4. At that point the arm should "stay" in that position once released | ||||
| 5. Exit the "TEACH" mode by clicking it again | ||||