
Controlling an Arm with the Bot Board (Basic Atom) and the SSC-32
Controlling an Arm with the Bot Board (Basic Atom) and the SSC-32
Before writing a program to control the arm, the serial data connection must be made. The SSC-32 includes a short two-conductor cable assembly. The black wire goes to ground and the yellow wire carries the signal.
The .1" spaced end connects to the SSC-32 at the pins marked RX and ground. Make sure the SSC-32 is set for 38.4k baud. Remove the DB9 enable jumpers if present. Yellow goes to RX, black goes to ground.
The .2" spaced end connects to Bot Board I/O pin 15. The black wire goes closer to the outside edge of the board; the yellow wire goes closer to the IC. Note: the nylon standoff has been removed for this photo.
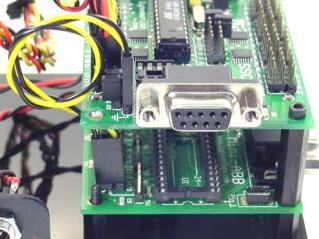 Figure 1.
Figure 1.
The SSC-32 will not send servo pulses until it receives the proper command. The program below enables channels 10 through 15, moving all servos to their mid positions (1500µs). Note: all serout commands must be one continuous line — if you copy and paste, remove any line breaks. You can substitute the 1500 values with other starting positions to prevent the arm from jumping.
The program below moves the arm from an initial position to a new position, then to another, then cycles back and forth. Each move takes 2 seconds to complete. These servo values are arbitrary — replace them with the actual positions you want the arm to move to.
Using variables and the gosub command makes the code easier to read. This program accomplishes the same thing as the previous one, but lets you set positions by name instead of raw numbers. The first serout still uses servo channel numbers directly.
I hope you find this simple tutorial helpful. More content will be added in the future. You can now control the Lynx arms easily and eloquently from a BASIC Atom / SSC-32.
Happy Roboting,
Jim Frye