02 - Simple Gait
Last modified by Eric Nantel on 2024/07/03 09:38
| 1. Install Arduino IDE | |
Use the official tutorial to install Arduino IDE | |
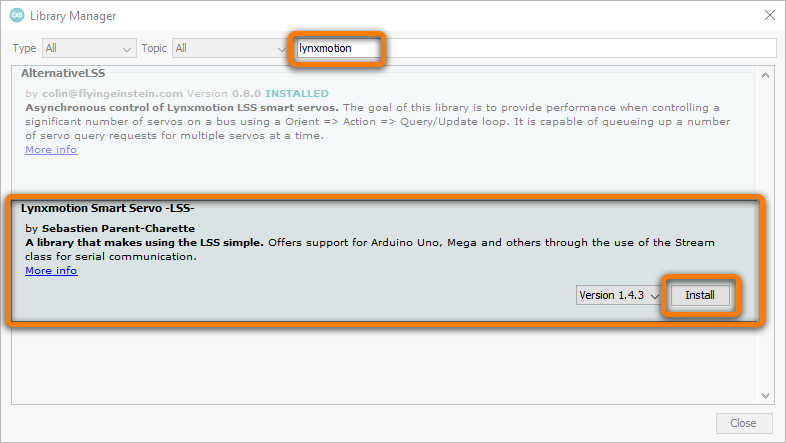
| 2. Install the Lynxmotion Smart Servo Library | |
| Use the official tutorial to install Libraries
|
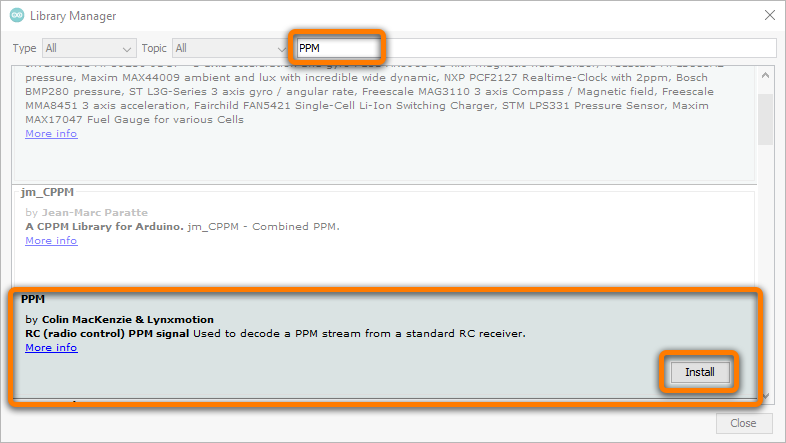
| 3. Install the PPM Library (for RC PPM use) | |
| Use the official tutorial to install Libraries
|
| 4. Get the mechDOG Simple Gait Sample Code | |
Download the Example
| |
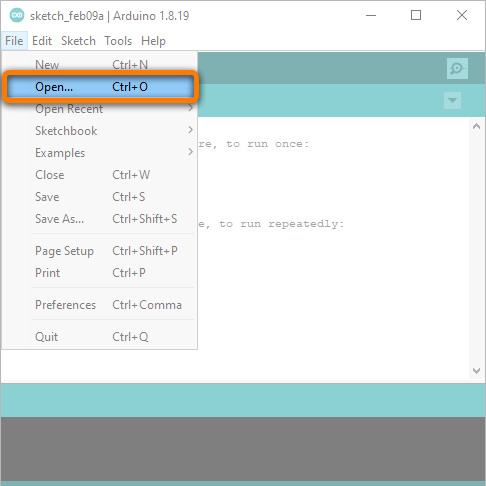
| 5. Open the sample code | |
| In the Arduino IDE open the sample code
|
| 6. Upload the Code | |
| Upload the code
|
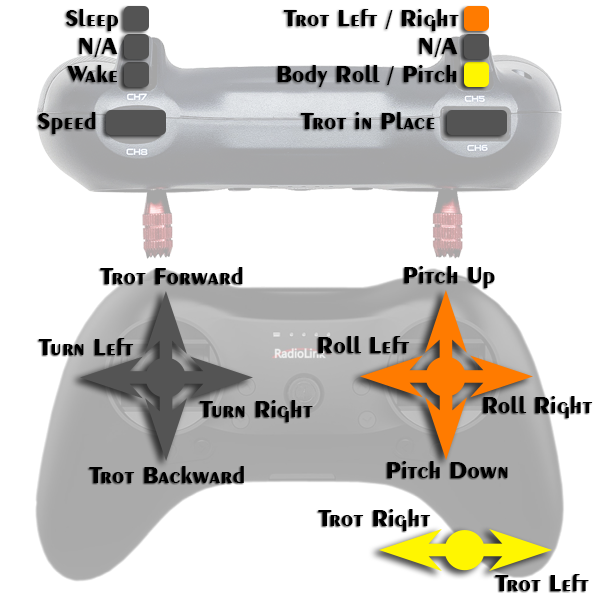
| 7. RC Controls | |
| Left Switch
Left Joystick:
Right Switch (mode)
Right Joystick in Body Roll / Pitch Mode
Right Joystick in Trot Left / Right Mode
Right Button
Potentiometer
|