
LSS - Specifications
Version 55.1 by Brahim Daouas on 2019/05/01 09:37
| Specification | HS1 | ST1 | HT1 | Notes | |
| Voltage | |||||
| Absolute minimum operating voltage | 6V | 6V | 6V | Lower voltages mean lower max. torque and rpm. | |
| Minimum operating voltage | 6.5V | 6.5V | 6.5V | ||
| Recommended operating voltage | 12V | 12V | 12V | A 3S (11.1V nominal) LiPo is ideal. | |
| Maximum operating voltage | 12.6V | 12.6V | 12.6V | ||
| Absolute maximum operating voltage | 15.2V | 15.2V | 15.2V | Allows for fully charged 12V NiMh, 12V lead acid and 11.1V LiPo batteries. | |
| Torque | |||||
| Max. static holding torque 12V (stall) | 8 Kg-cm | 14 Kg-cm | 29 Kg-cm | Servo can support this torque, but cannot move. See dynamic torque below. | |
| Max. dynamique torque 12V (~25%) | 1.6 Kg-cm | 2.8 Kg-cm | 5.8 Kg-cm | Servo should not need to move more than 25% of static / holding torque. | |
| RPM | |||||
| Kv Value | 8.35 RPM / V | 5 RPM / V | 5 RPM / V | Use to approximate servo's no load RPM between 6V and 12V | |
| No load RPM at 6V (Serial or RC) | 50 RPM | 30 RPM | 30 RPM | Refer to performance graph to estimate maximum RPM based on torque. | |
| No load RPM at 12V (Serial or RC) | 100 RPM | 60 RPM | 60 RPM | Refer to performance graph to estimate maximum RPM based on torque. | |
| RPM at 12V under 20% dynamic load | 75 RPM | 50 RPM | 50 RPM | ||
| Accuracy | |||||
| No load accuracy at 6V | ±0.4° | ±0.40° | ±0.15° | Accuracy depends on the angular holding stiffness value (CAH) | |
| No load accuracy at 12V | ±0.25° | ±0.25° | ±0.15° | Accuracy depends on the angular holding stiffness value (CAH) | |
| 25% dynamic load at 12V | ±1.75° | ±0.50° | ±1.50° | Accuracy depends on the angular holding stiffness value (CAH) | |
| Angular deflection at 6V (Max. holding torque) | 7.00° | 2.00° | 2.50° | Accuracy depends on the angular holding stiffness value (CAH) | |
| Angular deflection at 12V (Max. holding torque) | 2.00° | 1.50° | 2.00° | Accuracy depends on the angular holding stiffness value (CAH) | |
| Current | |||||
| Standby current at 6V | 60mA | 60mA | 60mA | ||
| Standby current at 12V | 70mA | 70mA | 70mA | ||
| Free-running current at 6V | 140mA | 140mA | 90mA | ||
| Free-running current at 12V | 180mA | 180mA | 320mA | ||
| Peak current at 12V (25% dynamic load) | 650mA | 650mA | 1200mA | Angular holding stiffness (CAH) value of 4 | |
| Current at 6V under max. holding torque | 350mA | 350mA | 550mA | Angular holding stiffness (CAH) value of 4 | |
| Current at 12V under max. holding torque | 300mA | 300mA | 800mA | Angular holding stiffness (CAH) value of 4 | |
| Temperature | |||||
| Operating temperature range | 45°C~75°C | 45°C~75°C | 45°C~90°C | ~55°C : servo idle temperature *Temperature shut-down can be reached after ~10min with continuous use of the servo under 25% of its maximum holding torque. | |
| Environmental temperature range | 0~65°C | 0~65°C | 0~65°C | These servos are meant for indoor use and are not dust or water resistant. | |
| Resolution | |||||
| Position | 1/10° | 1/10° | 1/10° | ||
| RPM | 1 RPM | 1 RPM | 1 RPM | ||
| Voltage | 1/10 V | 1/10 V | 1/10 V | ||
| Current | 1/10 A | 1/10 A | 1/10 A | ||
| Temperature | 1/10°C | 1/10°C | 1/10°C | ||
| Communication | |||||
| Communication Type | TTL Full Duplex Async Serial / RC PWM | TTL Full Duplex Async Serial / RC PWM | TTL Full Duplex Async Serial / RC PWM | TTL Full Duplex Async Serial : 8-N-1 (8bit,no parity,1stop) Standard RC PWM : 500uS~2500uS | |
| Baudrate range | 9600bps~921600bps | 9600bps~921600bps | 9600bps~921600bps | Max. baudrate depends on # of servos connected on the bus. | |
| Suggested Baudrate | 115200bps | 115200bps | 115200bps | ||
| Serial Protocol | LSS Protocol | LSS Protocol | LSS Protocol | Custom communication protocol. | |
| Connector Type (both sides) | Molex 4-pin, 2.54mm Low Profile | Molex 4-pin, 2.54mm Low Profile | Molex 4-pin, 2.54mm Low Profile | ||
| Servo Pinout | Rx | Vcc | GND | Tx | Rx | Vcc | GND | Tx | Rx | Vcc | GND | Tx | ||
| Angle | |||||
| Operating angle (Serial) | Up to 360° & Multi-turn | Up to 360° & Multi-turn | Up to 360° & Multi-turn | Multi-turn uses virtual positioning (see LSS Protocol ) | |
| Operating angle (RC) | Up to 360° | Up to 360° | Up to 360° | ||
| Continuous rotation / Wheel Mode (Serial & RC) | Yes | Yes | Yes | ||
| General | |||||
| Weight | 58.0g | 58.0g | 80.0g | Does not include horns or mounting hardware | |
| Size / Dimensions | 38.3 x 26 x 51 mm | 38.3 x 26 x 51 mm | 38.3 x 26 x 51 mm | Case only. See dimensions for details | |
| Gear Ratio | 1 : 146 | 1 : 253 | 1 : 320 | ||
| Case Material | 3-part ABS plastic | 3-part ABS plastic | ABS plastic top / bottom Aluminum center | ||
| Gear Material | Brass | Brass | Stainless steel | ||
| Output spline | 24T | 24T | 24T | ||
| Motor Type | Cored DC Motor | Cored DC Motor | Coreless DC Motor | ||
| Hardware (Mounting) | 2-56 x 1/4" | 2-56 x 1/4" | 2-56 x 1/4" | 28x mounting points | |
| Horn Material (Driven & Idler) | Aluminum | Aluminum | Aluminum | ||
| Performance | |||||
| Maximum mechanical power output | 1W | 1W | 2.4W | Obtained at recommended operating voltage. | |
| Performance Graph |
|
|
| Click image to enlarge |
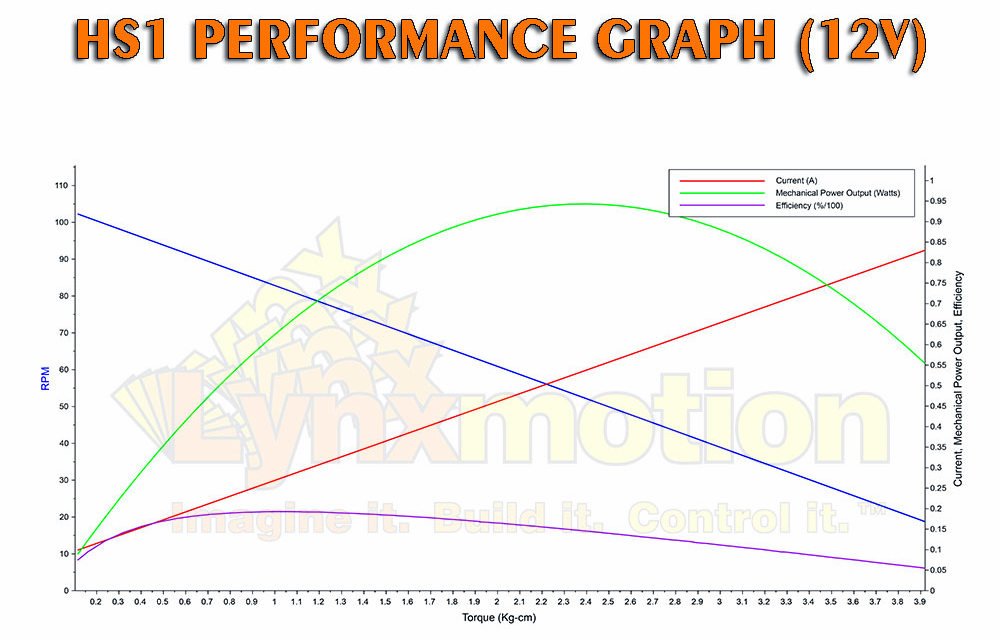
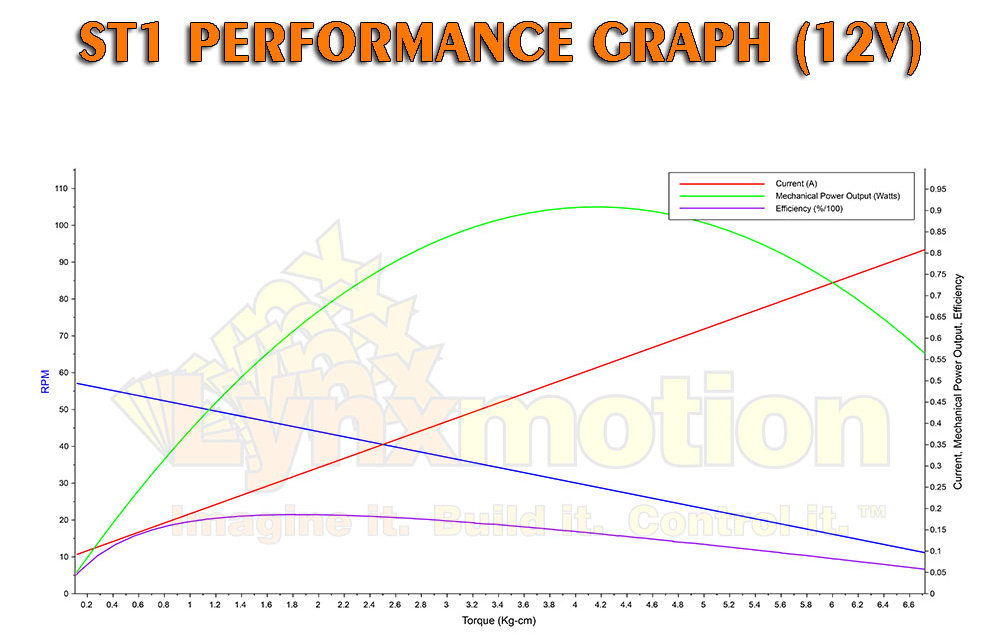
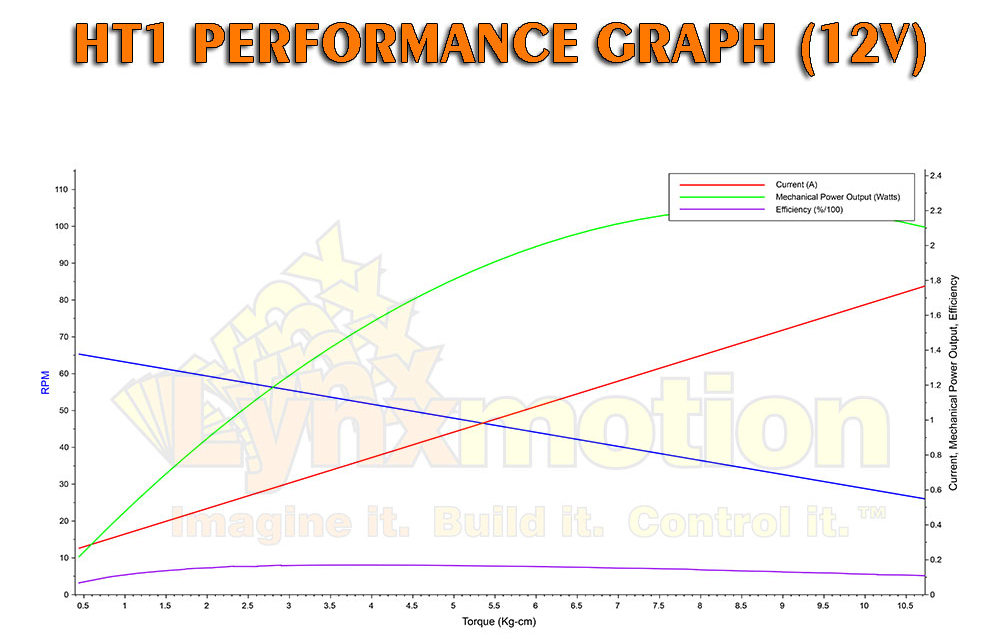
Values provided are based on test results. Actual values may vary slightly.