
LSS - 3 DoF Robotic Arm


Table of Contents
Description
Lynxmotion’s three degree of freedom (3DoF) articulated robotic arm was designed around Lynxmotion's configurable smart servo motors and is intended to be inexpensive yet highly versatile. The four-bar mechanical design ensures the end effector remains parallel to the surface, and offloads much of the weight of the joints onto the base.
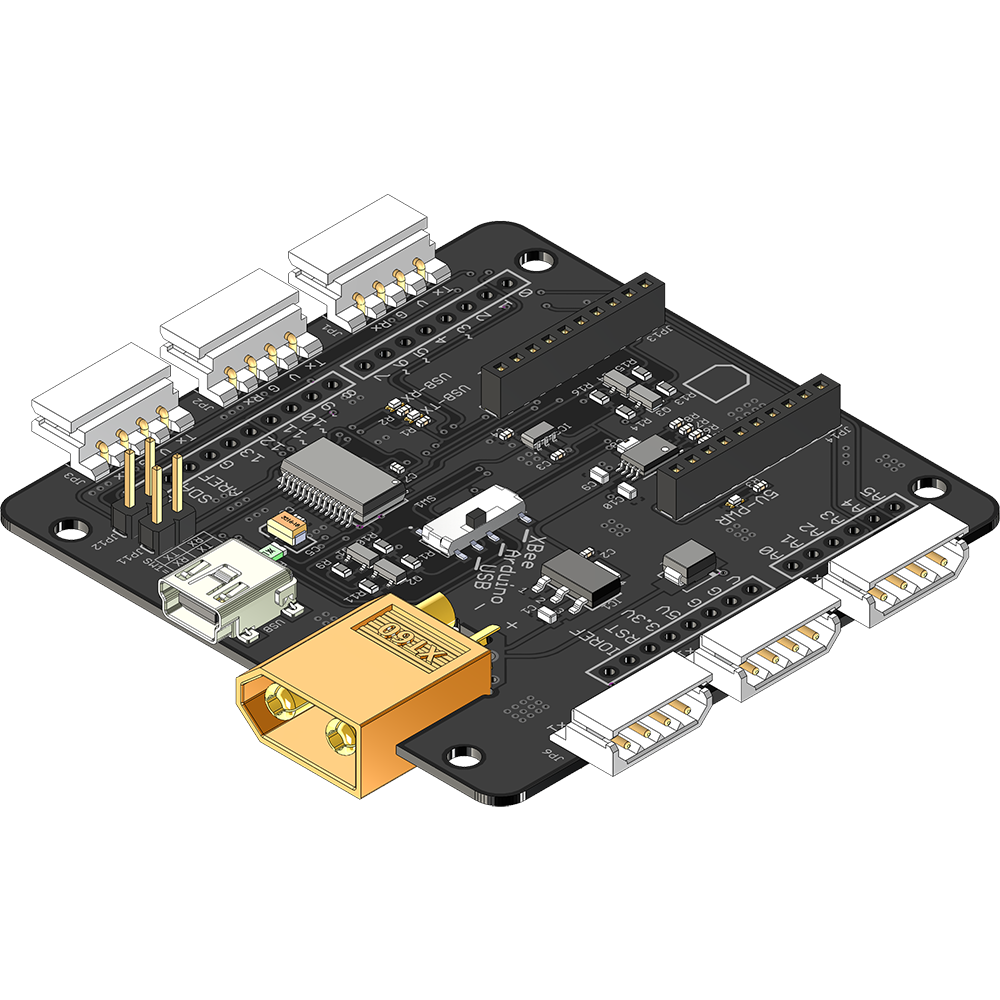
The included Mini Parallel Gripper uses a micro RC servo, acrylic and foam to be as lightweight as possible. The gripper opens to 40mm and the bracket allows it to be mounted horizontally or vertically.The arm includes three main electronic components: The LSS Adapter makes connecting to a computer, Arduino, Raspberry Pi, XBee or other serial device easy, while the LSS-2IO programmable microcontroller and LSS-5VR voltage regulator mean the normal RC servo in the gripper can be used with the LSS communication protocol.
CAD design files, as well as examples of how to communicate with the smart servos via Arduino and Python are available so that students and hobbyists can more easily integrate the arm into their projects. The graphical user interface LSS FlowArm, created using FlowBotics Studio, makes recording and playing back sequences effortless.
Combined with the Lynxmotion conveyor system, a tabletop assembly system can be created within a few hours. Although well suited for use on a desk for development and experimentation, the arm can be easily fitted to a mobile robot and powered using a 3S LiPo battery (sold separately) with XT60 connector.
Features
- Three fully configurable modular smart servo motors
- Composite G10 frame
- Parallel gripper opens 40mm
- Create sequences using handheld teach mode, coordinates, virtual arm
- Built-in safety (current, temperature, voltage)
- Easy to understand and human readable LSS communication protocol
Specifications
{Coming soon}
The following are provided with the gripper extended horizontally:
- Axes: 3 degrees of freedom + gripper
- Max Horizontal Reach: ___" / ____ cm
- Max Vertical Reach: ___" / ____ cm
- Payload: ___g (max reach)
- Power Supply In: 110V to 240V AC 50/60Hz AC (US type A plug)
- Power Supply Out: 12V, 6A DC with XT60 connector
- Arm weight: ____g / ____ pounds
- Gripper opening: ___ cm / ____ inches
Quickstart Guide
Actuators
| Location | Type | Static Torque | Max Speed |
| Base | ST1 | 14Kg-cm | 360° /s |
| Shoulder | ST1 | 14Kg-cm | 360° /s |
| Elbow | ST1 | 14Kg-cm | 360° /s |
| Gripper | LRC | 1.5 Kg-cm | 0.10s / 60° (6V) |
Note that when operated at lower voltages, torque and speed are reduced. | |||
Dimensions
{Coming Soon}
What's Included
{Coming soon}
| Smart Servos (LSS) | |||||
| 3x LSS-ST1 | 1x LSS-LRC | ||||
| LSS Standard | 9g RC Servo | ||||
 | |||||
| Electronics | |||||
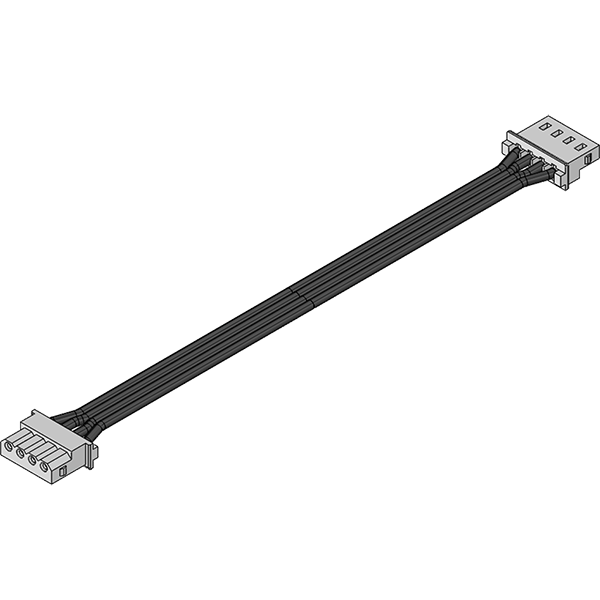
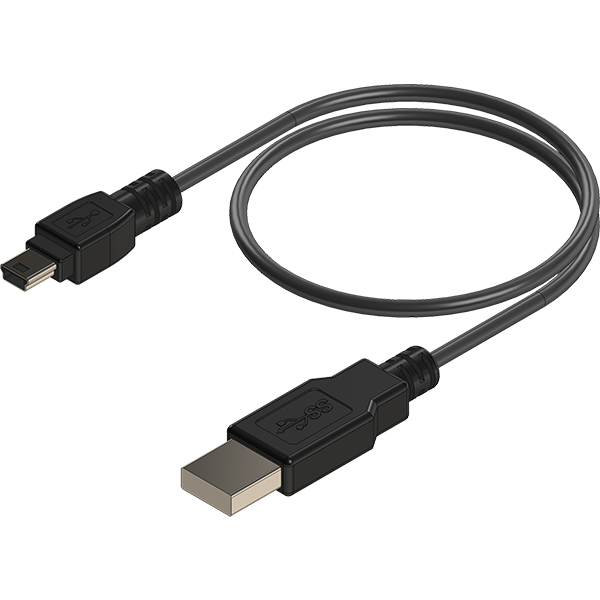
| 1x LSS-ADA | 2x LSS-C-300-S | 12x CC-01 | 2x AHS-EC | 1x 12V-XT60 | 1x USBC-02 |
| LSS Adapter | 300mm Cable | Cable Clip | Electronic Clip | 12V w/ XT60 | USB to Mini B |
 |  |  |  |  |  |
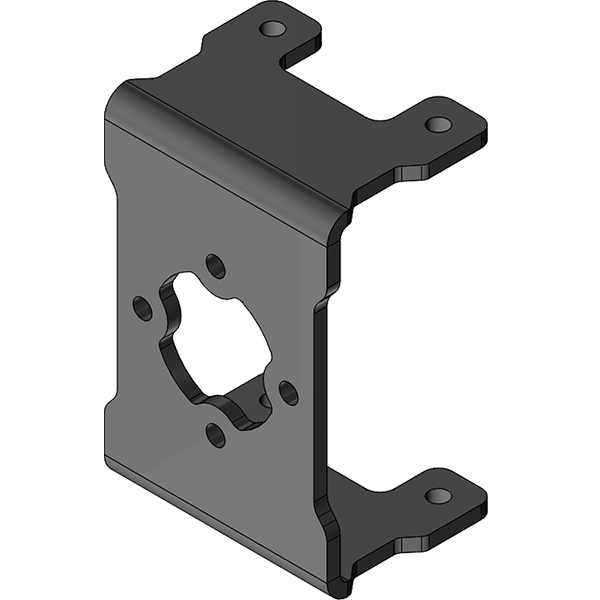
| Brackets (SES) | |||||
| 2x ASB-28 | |||||
| LSS Single Wide | |||||
 | |||||
| SES - Gearing & Horns | |||||
| SES - Tubing & Hubs | |||||
| SES - Mechanics | |||||
| 58x PHS-02 | 19x PHS-16 | 6x FHS-01 | 5x BB-05 | 5x DP-01 | BB-03 |
| 2-56 x 1/4" | M3 x 10mm | Flat M3 x 8mm | Bearing Beeds | Dowel Pin | Bearing 8x3mm |
 |  |  |  |  |  |
| Standoffs | |||||
| 5x AHS-19 | 4x AHS-20 | ||||
| M3 x 40mm | M3 x 18mm | ||||
 |  | ||||
| lss-base-rotate-g10-parts | |||||
| 1x - LSS-BR-T | 1x - LSS-BR-M1 | 1x - LSS-BR-M2 | 1x - LSS-BR-B | ||
| Top Plate | Middle Plate 1 | Middle Plate 2 | Bottom Plate | ||
 |  |  |  | ||