
Tracker ver 3.0 Manual
Tracker ver 3.0 Manual.
Author: Jim Frye
Date: October 20, 2009
| Table of Contents | Links |
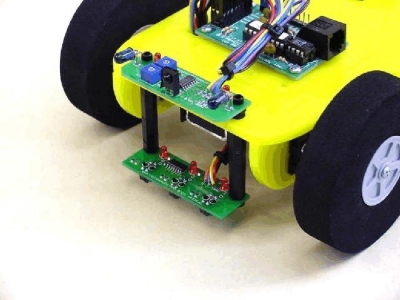
The sensor can be mounted the the underside of a robot chassis toward the front of the vehicle. Position the sensor close to the floor with the red LEDs facing up. The sensor will operate in an extremely wide range from about 0.5" from the floor to almost touching the surface. The sensor appears to be immune to normal ambient lighting, although it may be necessary to shield the sensor from extremes.
The sensor can easily be tested by following this simple step-by-step procedure.
- Prepare a test bed using a sheet of white paper and a short section of black electrical tape.
- Apply a regulated 5vdc to the red wire and ground to the black wire.
- Hold the sensor about 0.25" above the white paper and notice the red LEDs turn on. If not, quickly remove power and double-check your wiring.
- Move the sensor over the electrical tape positioning each of the three IR sensor pairs over the tape one at a time. You will notice the LED that's positioned over the tape go out and come back on as it's moved back to the white section of the paper.
- You can connect the outputs to a microcontroller to test them, or just connect the outputs to a volt meter. Each output will go high when positioned over white, and low when positioned over black.
The theory behind line tracking is actually pretty simple. An infrared LED is paired with an infrared detector. The LED is illuminated and directed to the surface where the line is to be detected. The detector is biased on and fed into a comparator to clean up the signal.
In order to keep the electronics as simple as possible a 74HC14 Schmidt-trigger hex inverter will replace the comparator circuitry. The very high input impedance, built in hysteresis and low parts count makes the CMOS version an excellent alternative.
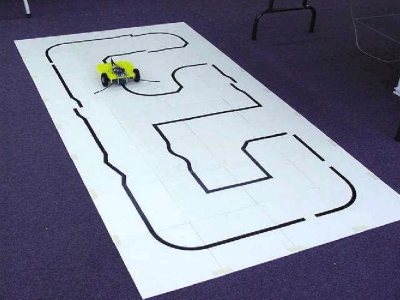
Here is a list of the verified materials that can be used to make a line tracking course. I am sure with experimentation, other materials can be used with equally successful results.
- Black electrical tape on white or light colored floor tile
- Black electrical tape on white 3mm Sintra PVC. A 4x8' sheet can be cut into 32 12" square panels. Each panel can have a straight or turning pattern, so the course can be changed. A radius of 6" can easily be made. This combination makes a great, durable, portable, and re-configurable line tracking course.
- Black Sharpie marker on end rolls of newsprint or butcher paper. With this material the course can be made as long as needed. Use this for line tracking dragsters.
The programming is very simple. The outputs go low when the LED/IR Detector pair is positioned over a black surface, and high when positioned over a white surface. Check for detection of a line. If the center surface sees the line, go forward. If the left sensor sees the line, turn left. If the right sensor sees the line, turn right. You will want the robot to remember which sensor saw the line last and continue to make corrections in order to negotiate turns where the line will be out of the sensors' view for a limited amount of time. I have included some sample files for the Basic Stamp. There is even some code that can handle a search for the line if it loses it completely. Experiment with the code and have fun.
Basic Stamp 2: Simple Line Following
'program: ltrack1.bas
'This program does simple line following.
symbol error_level = b0
symbol left_sensor = pin5
symbol center_sensor = pin6
symbol right_sensor = pin7
low 0 'Left Servo
low 1 'Right Servo
start: 'Line seen, correct direction
if left_sensor = 0 then a
if right_sensor = 0 then b
if center_sensor = 0 then c
'Line not seen, do last action
if error_level = 1 then a
if error_level = 2 then b
if error_level = 3 then c
goto start
a: error_level = 1
pulsout 0,150 'Left wheel stop
pulsout 1,200 'Right wheel forward
pause 10
goto start
b: error_level = 2
pulsout 0,200 'Left wheel forward
pulsout 1,150 'Right wheel stop
pause 10
goto start
c: error_level = 3
pulsout 0,200 'Left wheel forward
pulsout 1,200 'Right wheel forward
pause 10
goto start
Basic Stamp 2: Advanced Line Following
'program: ltrack2.bas
'This program does advanced line
'following. If it loses the line it will
'do a search for it.
symbol x = b0
symbol y = b1
symbol correct = b2
symbol lost = b3
symbol left = pin5
symbol center = pin6
symbol right = pin7
low 0 'Left Servo
low 1 'Right Servo
lost = 1
correct = 1
'Line seen, correct position
start:
if right = 0 then on_trac_right
start1:
if left = 0 then on_trac_left
start2:
if center = 0 then on_trac_center
'Line not seen, do last action
lost = lost + 1
if lost = 40 then find_line
if correct = 1 then off_trac_center
if correct = 2 then off_trac_left
if correct = 3 then off_trac_right
goto start
on_trac_center:
correct = 1
lost = 0
gosub forward
goto start
on_trac_left:
correct = 2
lost = 0
gosub left_turn
goto start1
on_trac_right:
correct = 3
lost = 0
gosub right_turn
goto start2
off_trac_center:
correct = 1
gosub forward
goto start
off_trac_left:
correct = 2
gosub left_turn
goto start
off_trac_right:
correct = 3
gosub right_turn
goto start
find_line:
for x=1 to 50
gosub look
gosub left_spin
next
for x=1 to 100
gosub look
gosub right_spin
next
for x=1 to 50
gosub look
gosub left_spin
next
for x=1 to 50
gosub look
gosub forward
next
goto find_line
look:
if right = 0 then start
if left = 0 then start
if center = 0 then start
return
forward:
pulsout 0,200 'Left wheel forward
pulsout 1,200 'Right wheel forward
pause 10
return
left_turn:
pulsout 0,150 'Left wheel stop
pulsout 1,200 'Right wheel forward
pause 10
return
right_turn:
pulsout 0,200 'Left wheel forward
pulsout 1,150 'Right wheel stop
pause 10
return
left_spin:
pulsout 0,100 'Left wheel reverse
pulsout 1,200 'Right wheel forward
pause 10
return
right_spin:
pulsout 0,200 'Left wheel forward
pulsout 1,100 'Right wheel reverse
pause 10
Return