About Biped Pete
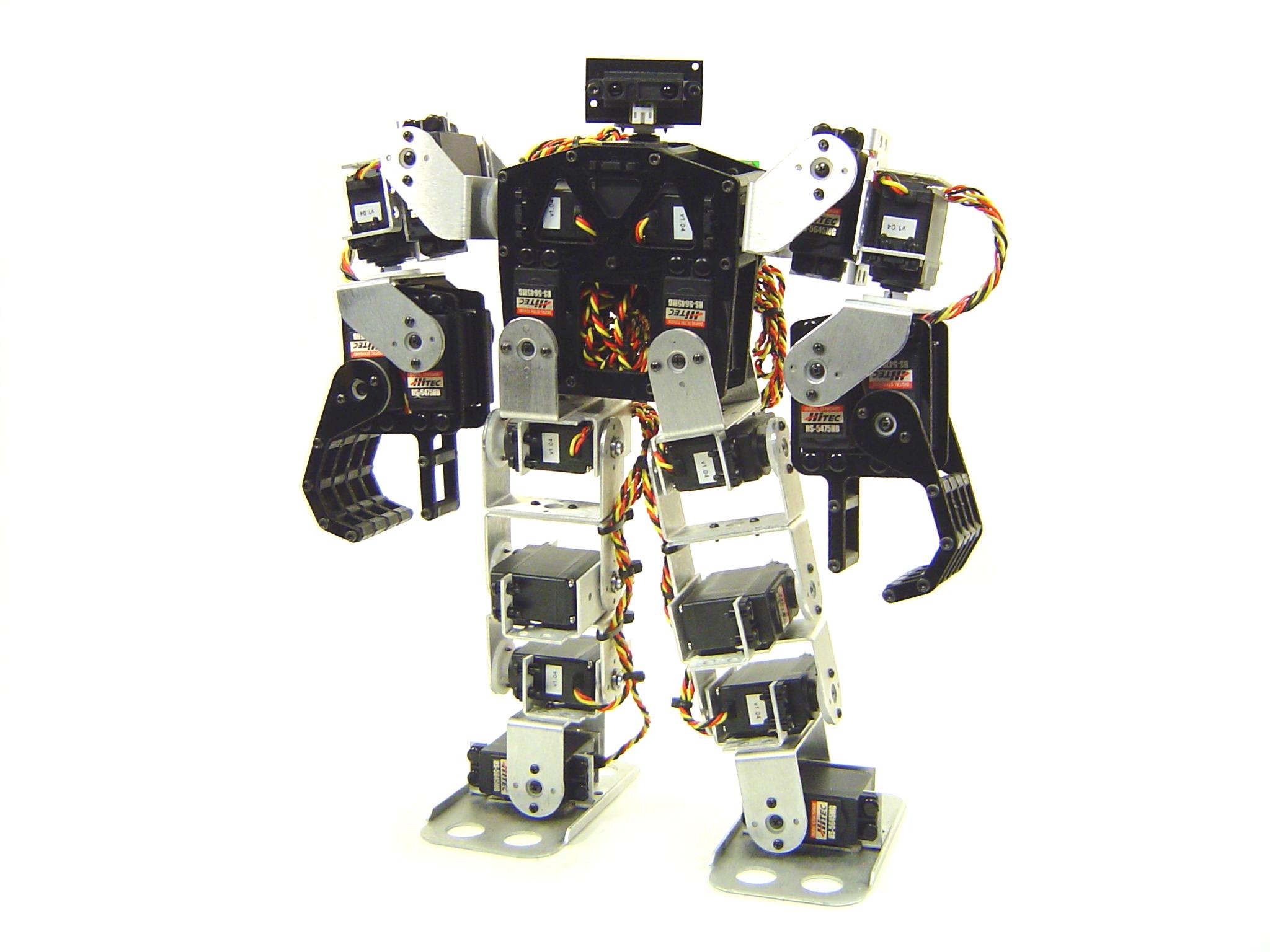
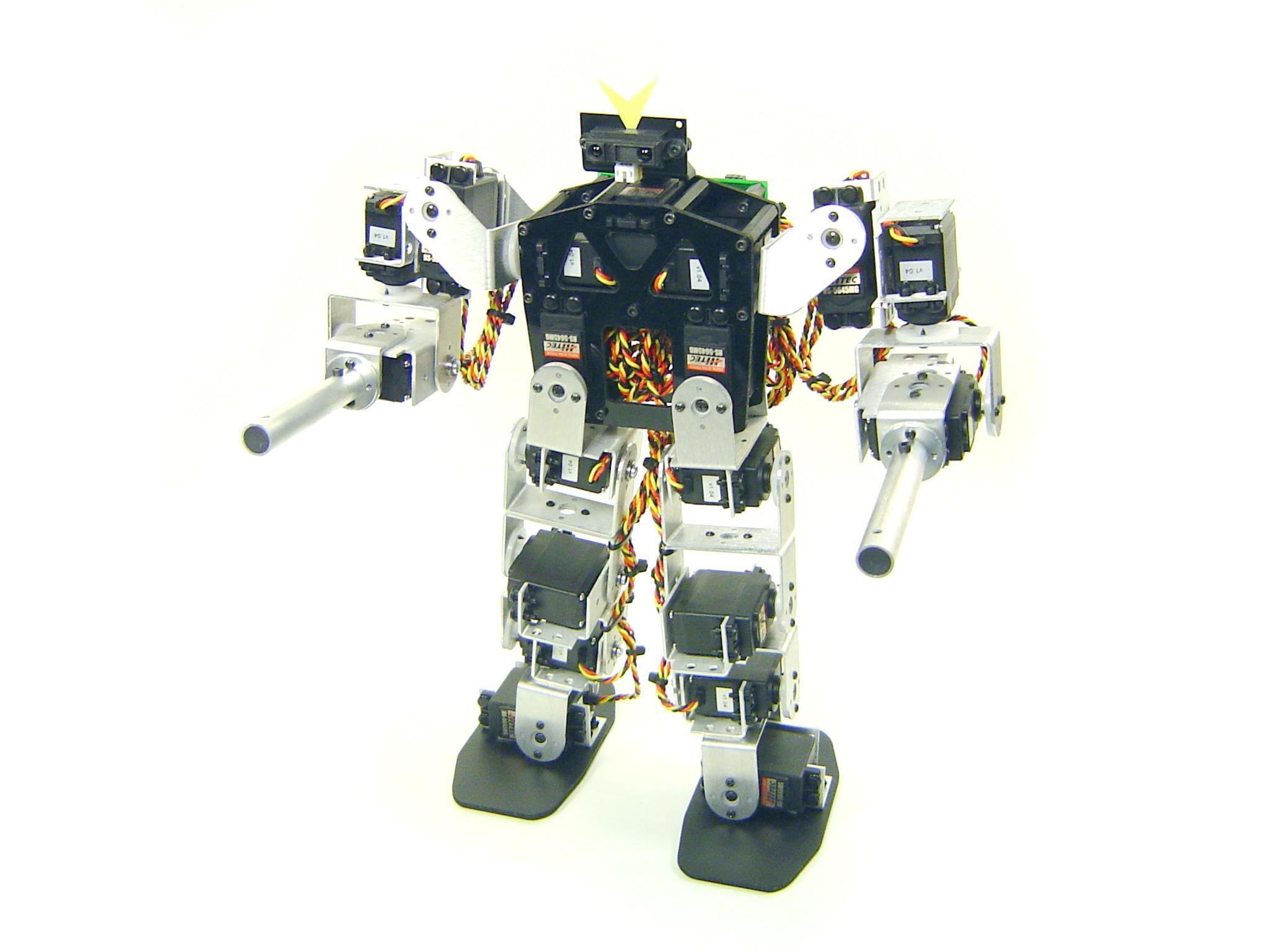
The Lynxmotion Pete humanoid biped robot is a 22 DoF R/C servo based biped walker with gripper hands as the default configuration. This enables Pete to walk forward or backwards, turn in place left or right with variable speed. The leg design is similar to that of a human.Several versions of Pete are available:
Hardware only: this includes only the brackets and hardware; no electronics or servos are included.
No electronics: this includes the complete frame and servos
No software: this includes the complete frame, servos and SSC-32 servo servo controller
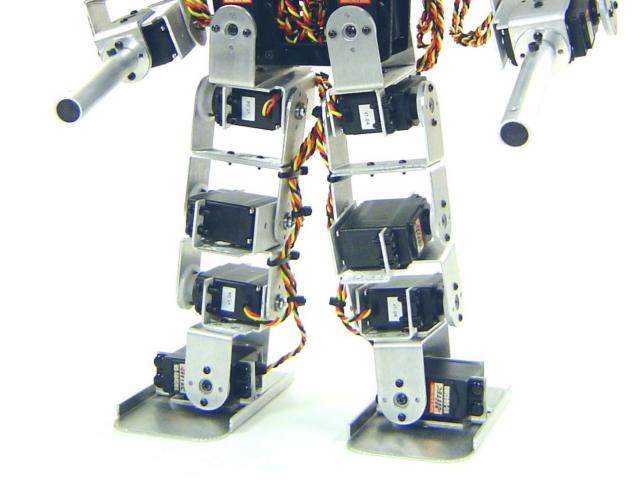
Pete has five degrees of freedom per leg, five degrees of freedom per arm and two degrees of freedom in the head. It is important to note that at this time, Pete is a research platform and requires that the user create their own walking algorithm and complete the electronics for either remote controlled or autonomous functionality.
The Mechanics
The robot is made from black anodized aluminum servo brackets (the images shown at right with brushed brackets are prototypes) and ultra-tough laser-cut Lexan structural components. Since the kit is based on the Servo Erector Set (S.E.S.), the parts can be easily used (in conjunction with a few other parts sold separately) to make a variety of other robots such as quadrupeds, hexapods, robot arms and more.
The Servos
The complete kit includes a variety of servos:
14x Hitec HS-645 high-torque servos for the foot, ankle, knee, hip, "waist" and 2DoF shoulder.
6x Hitec HS-422 servos for the wrist, gripper, neck and head and elbow
Note that even with these powerful servos, not all movements will be possible due to limited torque at specific joints.
Powering Options
As with any walking robot, weight is a major concern. The best approach is to keep the weight to an absolute minimum. We recommend using LiPo battery technology or the 6.0 Volt Ni-MH 1600mAh Battery Pack (BAT-03) and the Universal Smart Charger (USC-01).
Electronics
Only the complete kit includes a dedicated SSC-32 servo controller and serial cable. For wireless control, you can use a Bluetooth adapter with the SSC-32.
Controlling the Biped
The robot can be controlled in many ways. Currently no software or sample code is provided as this is a humanoid development platform. The simplest method is a static balanced gait. We do not currently have programming available, but with the powerful SSC-32 Servo Sequencer or Lynxmotion Visual Sequencer are the easiest options to get the robot walking. A more complex method would be to incorporate a multiaxis accelerometer or gyro feedback for a dynamic balanced gait.
Important!
To keep costs down we are not providing printed Assembly Guides. They are provided online, so you will need to print them when you order the kits. By providing the Assembly Guides online we can provide more detailed and up to date information than the old hardcopy method allowed.